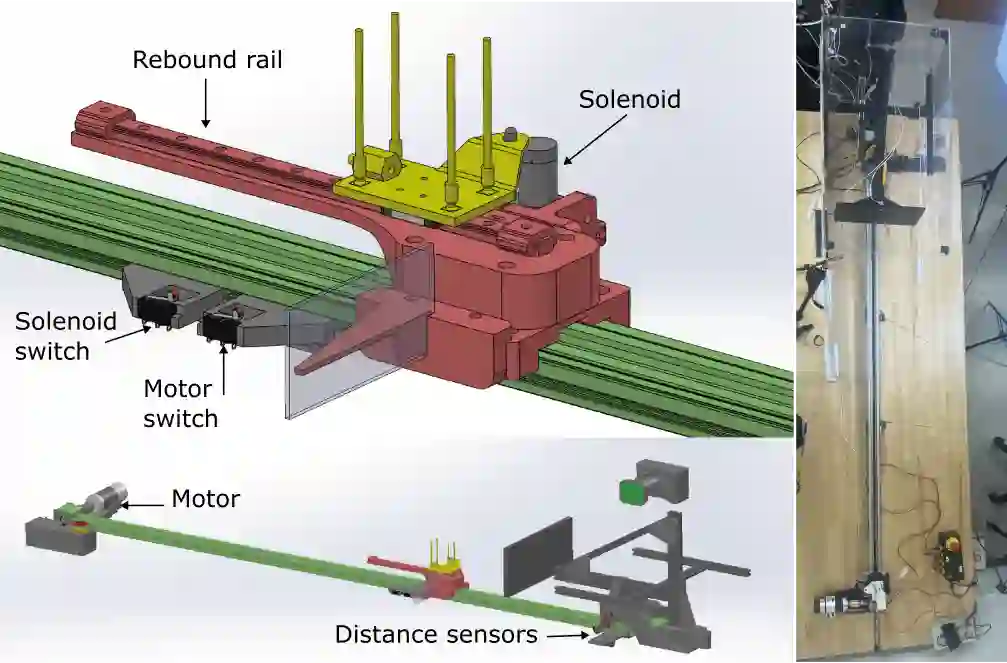
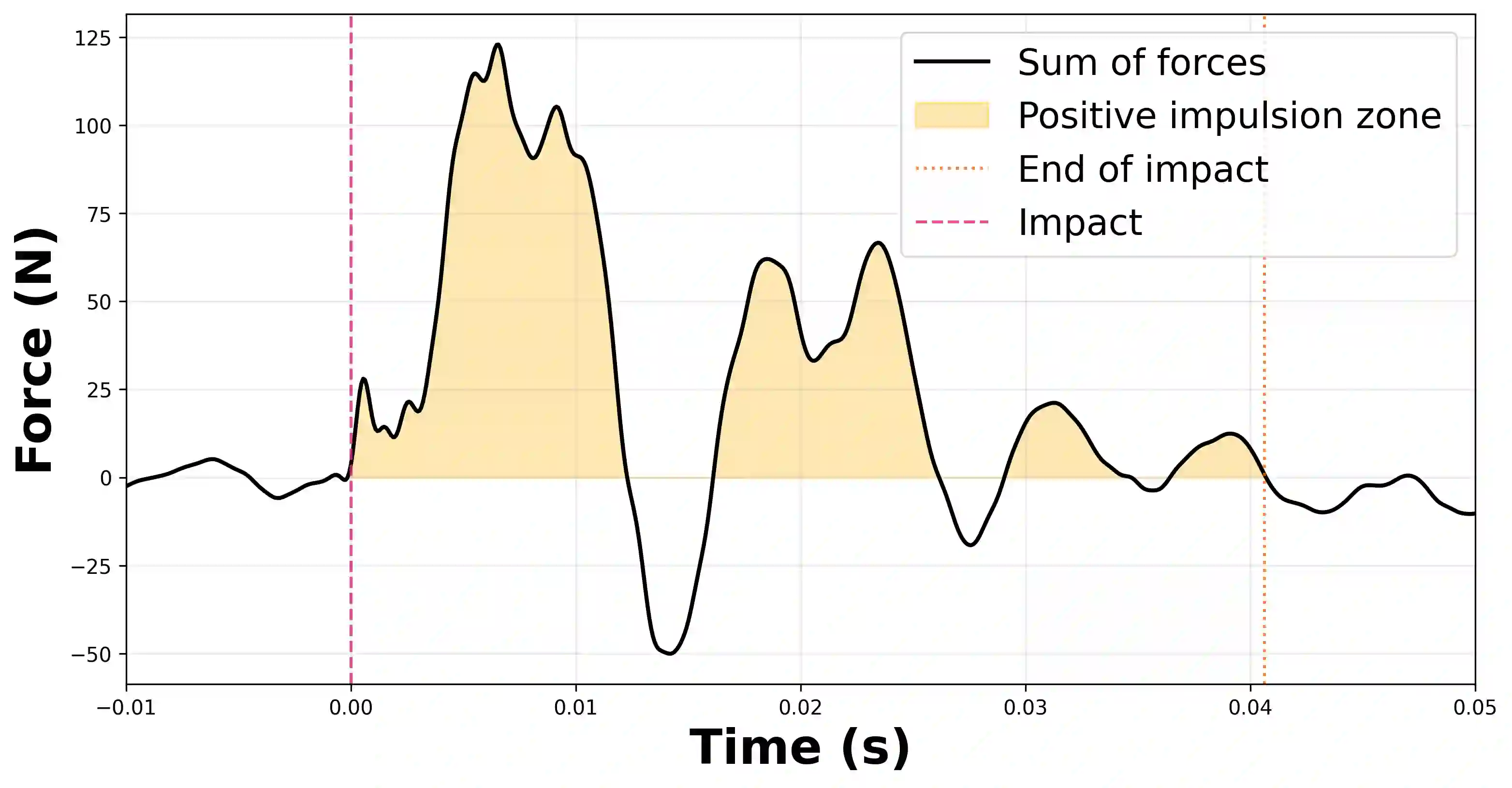
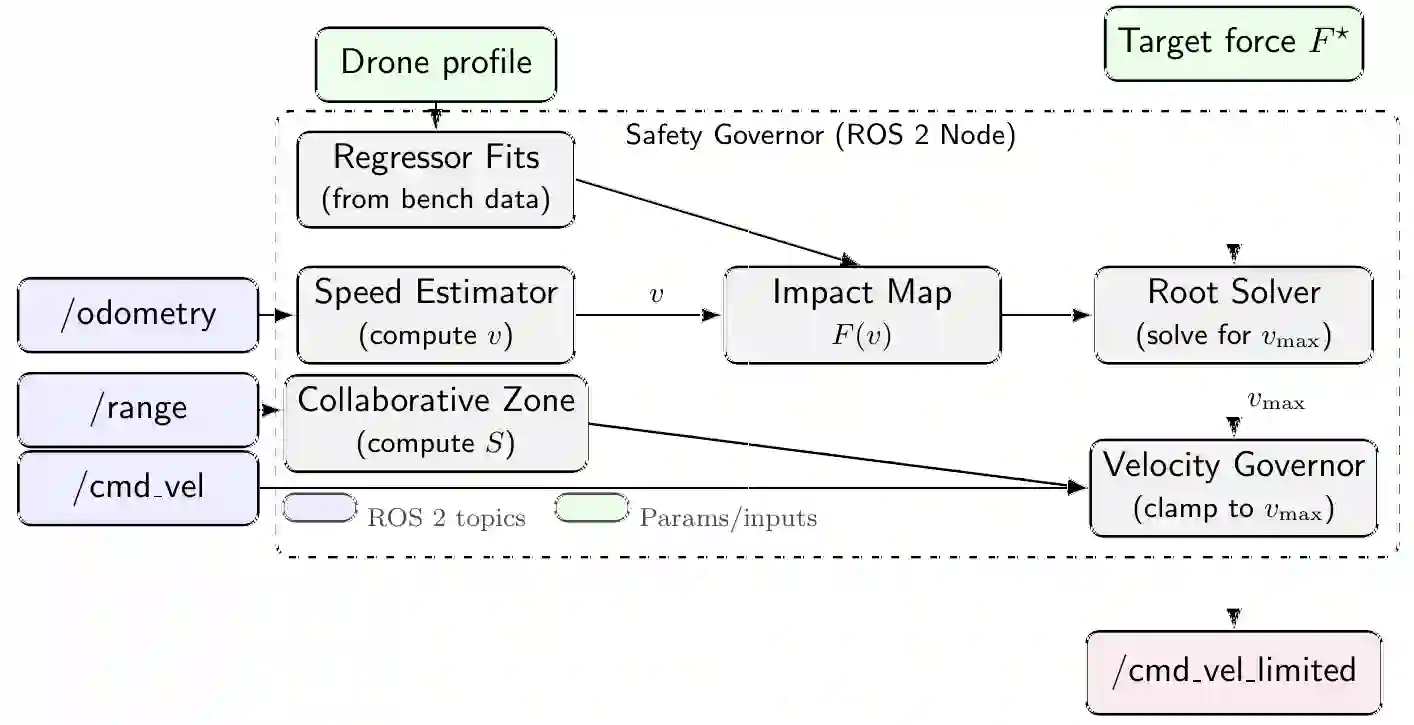
Indoor micro-aerial vehicles (MAVs) are increasingly used for tasks that require close proximity to people, yet practitioners lack practical methods to tune motion limits based on measured impact risk. We present an end-to-end, open toolchain that converts benchtop impact tests into deployable safety governors for drones. First, we describe a compact and replicable impact rig and protocol for capturing force-time profiles across drone classes and contact surfaces. Second, we provide data-driven models that map pre-impact speed to impulse and contact duration, enabling direct computation of speed bounds for a target force limit. Third, we release scripts and a ROS2 node that enforce these bounds online and log compliance, with support for facility-specific policies. We validate the workflow on multiple commercial off-the-shelf quadrotors and representative indoor assets, demonstrating that the derived governors preserve task throughput while meeting force constraints specified by safety stakeholders. Our contribution is a practical bridge from measured impacts to runtime limits, with shareable datasets, code, and a repeatable process that teams can adopt to certify indoor MAV operations near humans.
翻译:室内微型飞行器(MAV)越来越多地用于需要接近人员的任务,但从业者缺乏基于实测冲击风险调整运动限制的实用方法。我们提出了一种端到端的开源工具链,可将实验台冲击测试转化为可部署的无人机安全调控器。首先,我们描述了一种紧凑且可复现的冲击测试装置及协议,用于捕获不同无人机类别和接触表面的力-时间曲线。其次,我们提供了数据驱动模型,将碰撞前速度映射为冲量和接触持续时间,从而能够直接计算目标力限值对应的速度边界。第三,我们发布了在线执行这些边界并记录合规性的脚本及ROS2节点,支持针对特定设施的策略。我们在多个商用现货四旋翼无人机和典型室内设施上验证了该工作流程,证明所推导的调控器在满足安全利益相关方指定的力约束的同时,保持了任务执行效率。我们的贡献在于搭建了从实测冲击到运行时限制的实用桥梁,提供了可共享的数据集、代码和可重复的流程,团队可采用该流程认证室内MAV在人员附近的安全运行。