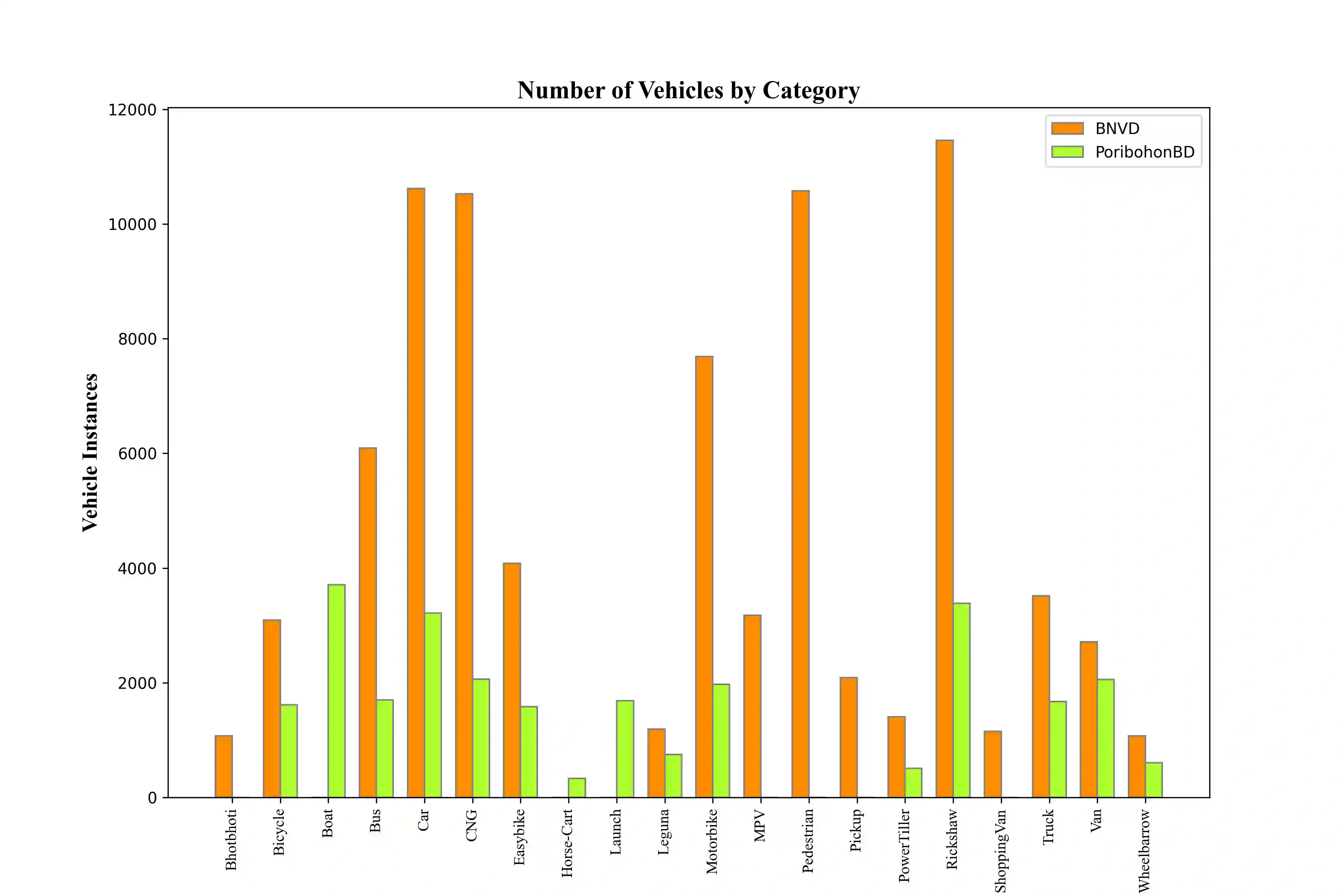
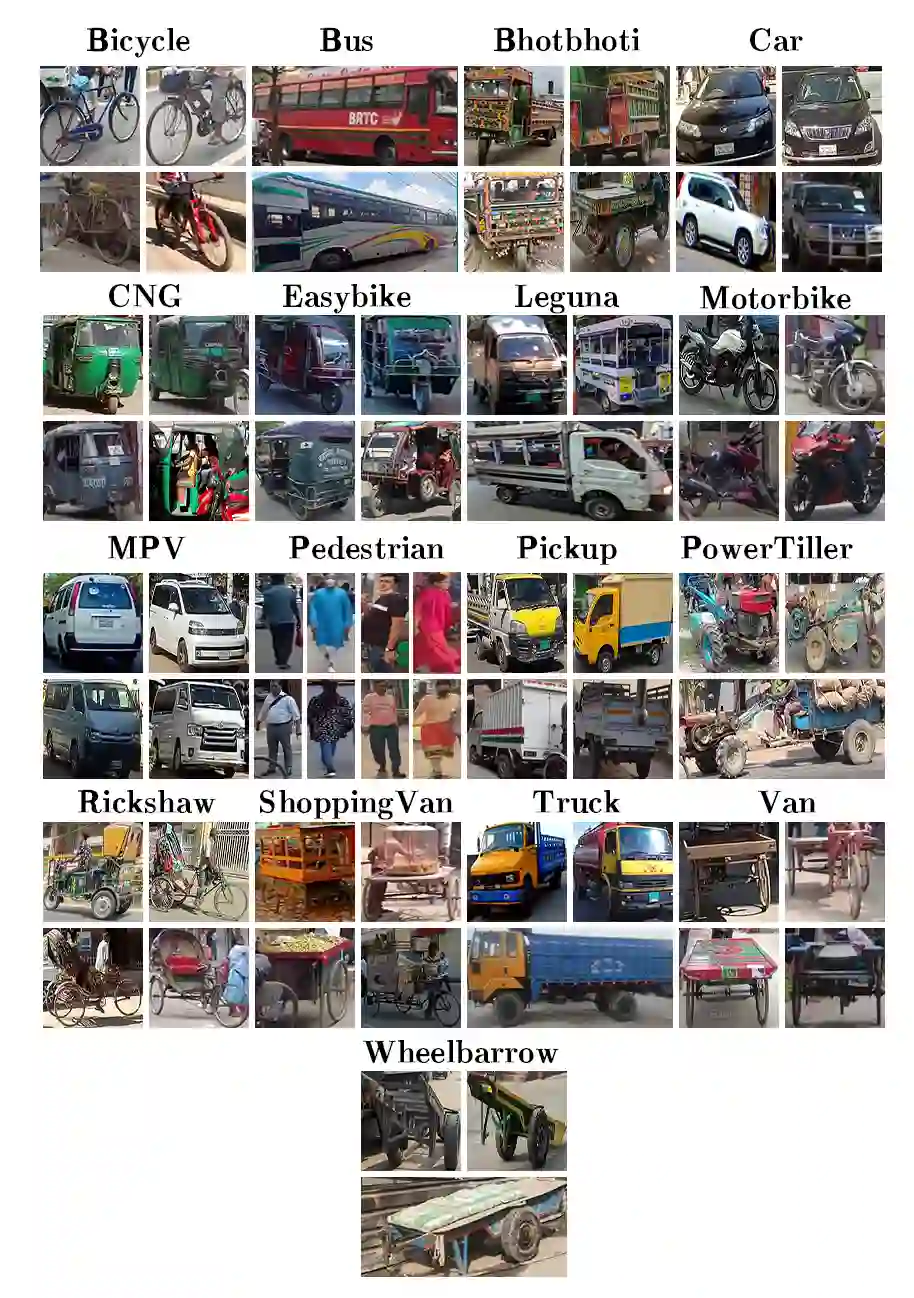
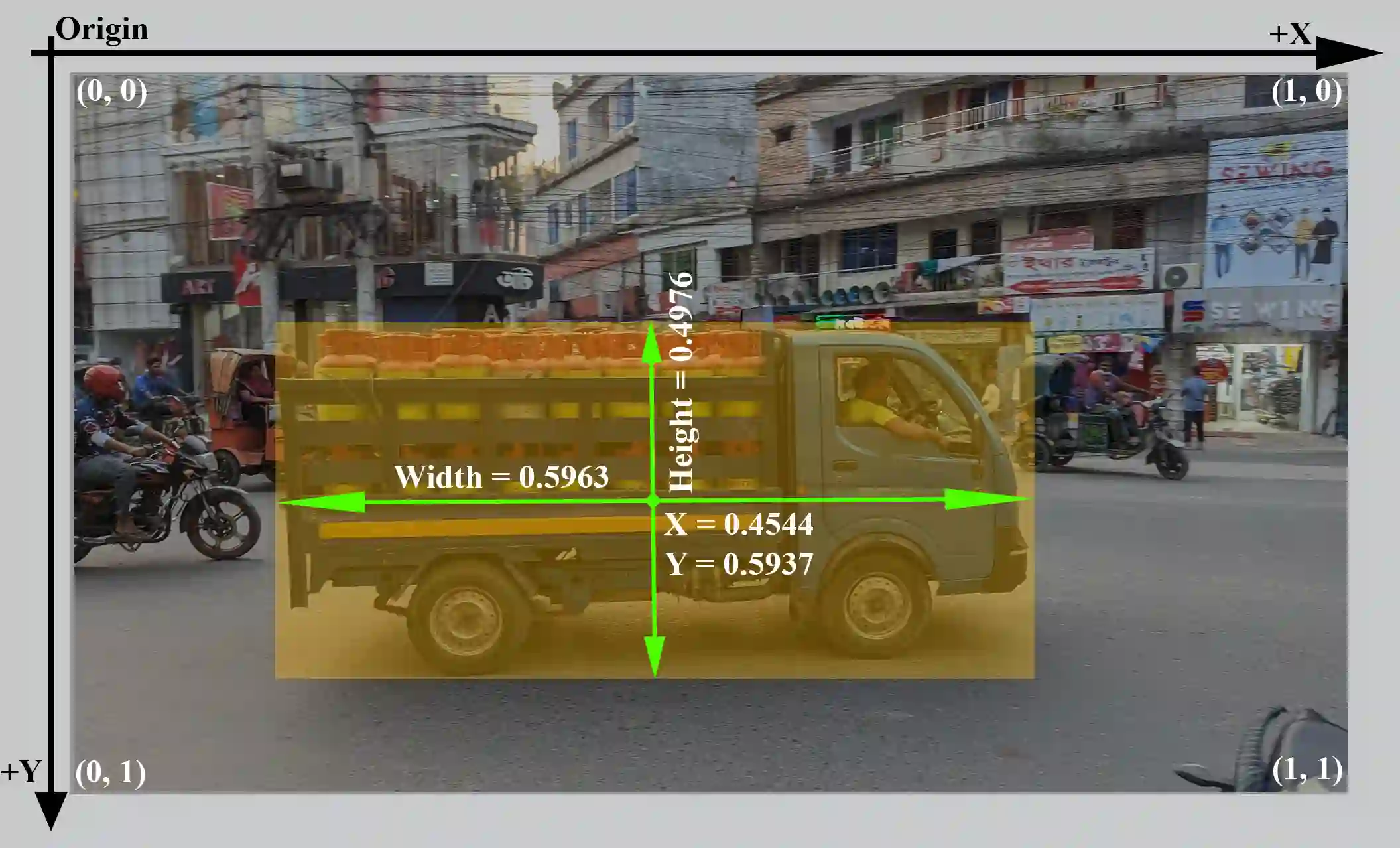
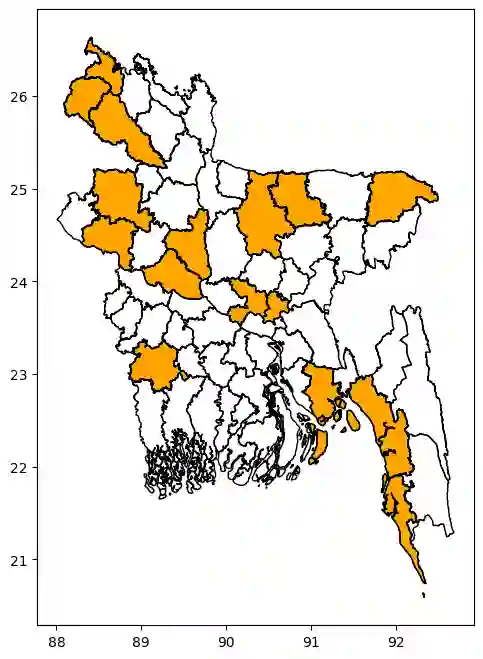
The success of autonomous navigation relies on robust and precise vehicle recognition, hindered by the scarcity of region-specific vehicle detection datasets, impeding the development of context-aware systems. To advance terrestrial object detection research, this paper proposes a native vehicle detection dataset for the most commonly appeared vehicle classes in Bangladesh. 17 distinct vehicle classes have been taken into account, with fully annotated 81542 instances of 17326 images. Each image width is set to at least 1280px. The dataset's average vehicle bounding box-to-image ratio is 4.7036. This Bangladesh Native Vehicle Dataset (BNVD) has accounted for several geographical, illumination, variety of vehicle sizes, and orientations to be more robust on surprised scenarios. In the context of examining the BNVD dataset, this work provides a thorough assessment with four successive You Only Look Once (YOLO) models, namely YOLO v5, v6, v7, and v8. These dataset's effectiveness is methodically evaluated and contrasted with other vehicle datasets already in use. The BNVD dataset exhibits mean average precision(mAP) at 50% intersection over union (IoU) is 0.848 corresponding precision and recall values of 0.841 and 0.774. The research findings indicate a mAP of 0.643 at an IoU range of 0.5 to 0.95. The experiments show that the BNVD dataset serves as a reliable representation of vehicle distribution and presents considerable complexities.
翻译:自主导航的成功依赖于鲁棒且精确的车辆识别能力,而区域特定的车辆检测数据集匮乏阻碍了上下文感知系统的发展。为推进地面物体检测研究,本文提出针对孟加拉国最常见车辆类别的本土车辆检测数据集。该数据集涵盖17种不同车辆类别,包含17326幅图像的81542个完全标注实例。每幅图像宽度均设定为至少1280像素,数据集平均车辆边界框与图像面积比为4.7036。该孟加拉国本土车辆数据集(BNVD)充分考虑了地理环境、光照条件、车辆尺寸多样性和方向变化等因素,以增强对突发场景的鲁棒性。在BNVD数据集评估中,本研究采用四种连续版本的You Only Look Once(YOLO)模型(即YOLO v5、v6、v7和v8)进行系统性评估。通过方法化评估并对比现有车辆数据集,BNVD数据集在交并比(IoU)为50%时平均精度均值(mAP)达0.848,对应精确率0.841和召回率0.774;在IoU区间0.5至0.95时mAP为0.643。实验结果表明,BNVD数据集能够可靠表征车辆分布特征,并具有显著复杂度。