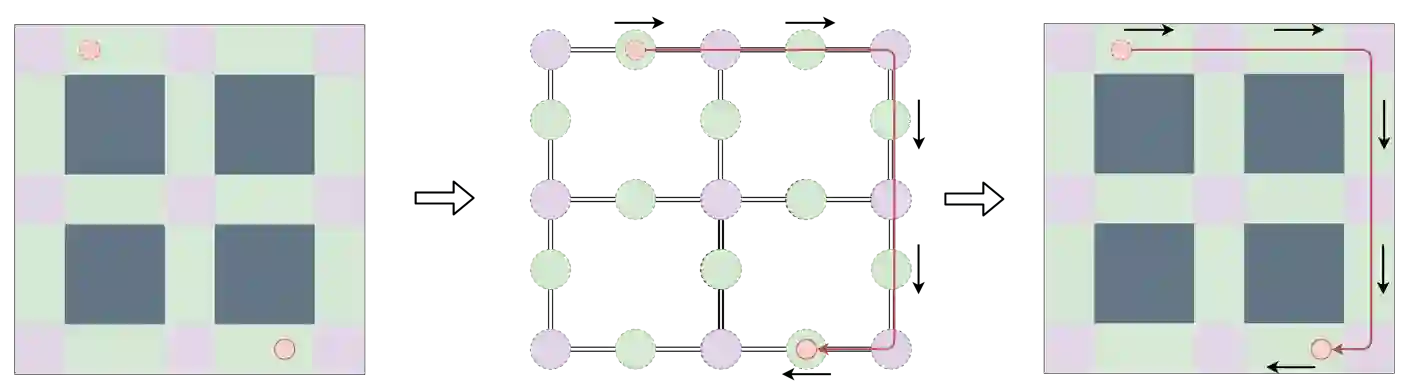
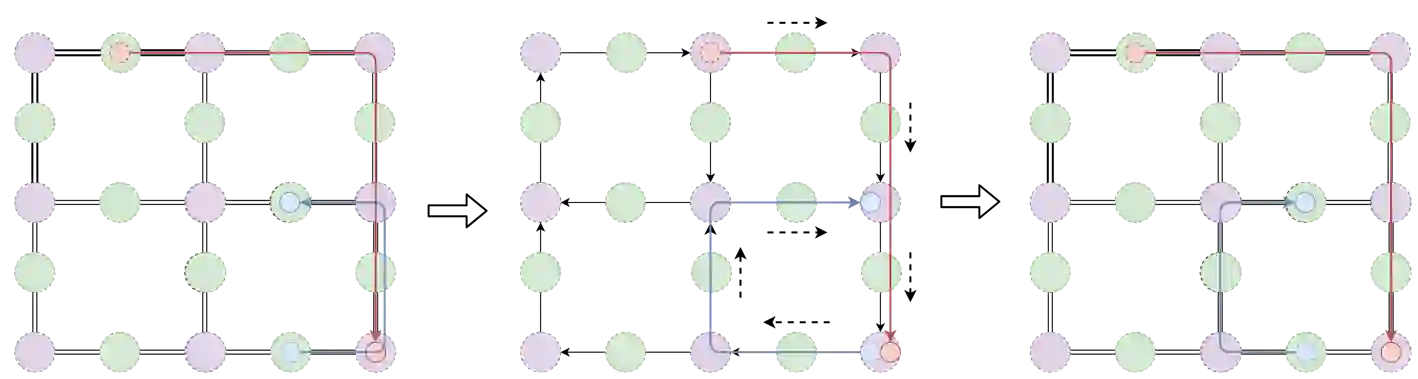
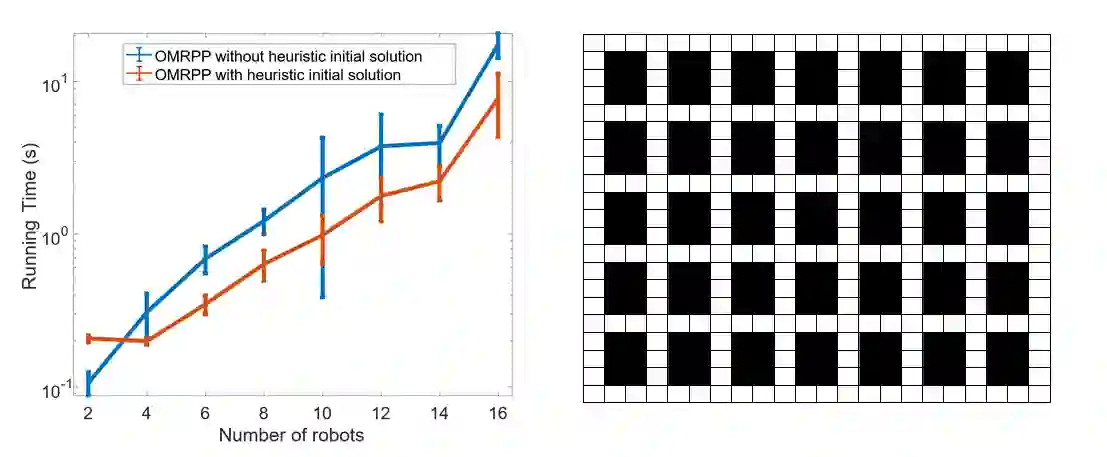
We study optimal Multi-robot Path Planning (MPP) on graphs, in order to improve the efficiency of multi-robot system (MRS) in the warehouse-like environment. We propose a novel algorithm, OMRPP (One-way Multi-robot Path Planning) based on Integer programming (IP) method. We focus on reducing the cost caused by a set of robots moving from their initial configuration to goal configuration in the warehouse-like environment. The novelty of this work includes: (1) proposing a topological map extraction based on the property of warehouse-like environment to reduce the scale of constructed IP model; (2) proposing one-way passage constraint to prevent the robots from having unsolvable collisions in the passage. (3) developing a heuristic architecture that IP model can always have feasible initial solution to ensure its solvability. Numerous simulations demonstrate the efficiency and performance of the proposed algorithm.
翻译:我们在图表上研究最佳多机器人路径规划(MPP),以提高多机器人系统(MRS)在类似仓库环境中的效率,我们提议一种新型算法,即基于整数编程(IP)方法的单向多机器人路径规划(OMRPP),我们侧重于降低一组机器人从最初配置转向类似仓库环境中的目标配置造成的成本,这项工作的新颖之处包括:(1) 提议根据类似仓库环境的特性绘制地形图,以缩小已建IP模型的规模;(2) 提议单向通道限制,以防止机器人在通道上发生无法解决的碰撞;(3) 开发一种超常结构,即IP模型总是能够有可行的初步解决办法来确保其可溶性;许多模拟都表明拟议的算法的效率和性能。