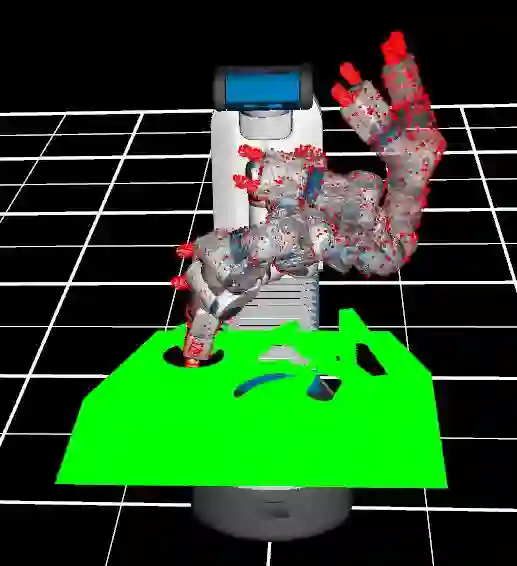
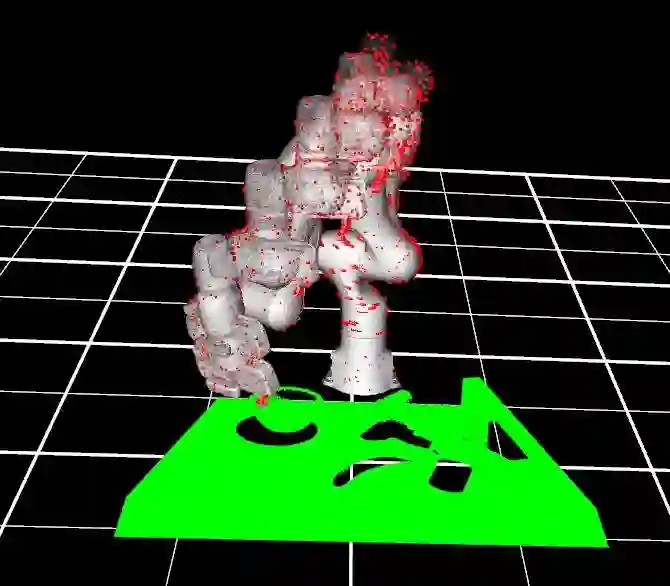
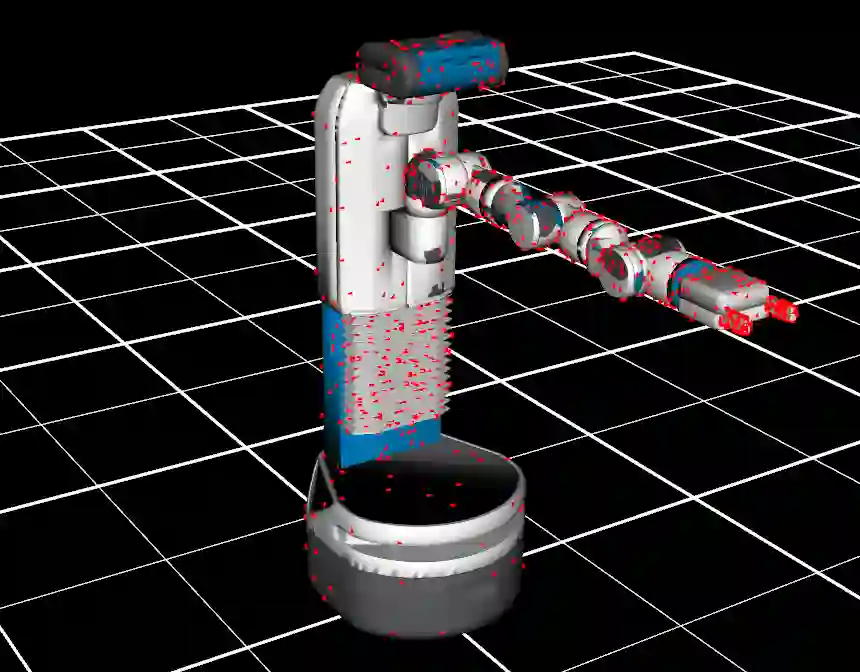
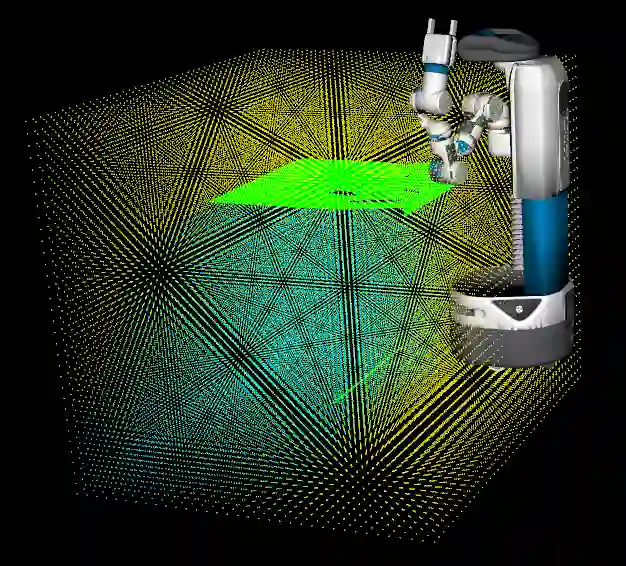
We introduce a new trajectory optimization method for robotic grasping based on a point-cloud representation of robots and task spaces. In our method, robots are represented by 3D points on their link surfaces. The task space of a robot is represented by a point cloud that can be obtained from depth sensors. Using the point-cloud representation, goal reaching in grasping can be formulated as point matching, while collision avoidance can be efficiently achieved by querying the signed distance values of the robot points in the signed distance field of the scene points. Consequently, a constrained non-linear optimization problem is formulated to solve the joint motion and grasp planning problem. The advantage of our method is that the point-cloud representation is general to be used with any robot in any environment. We demonstrate the effectiveness of our method by conducting experiments on a tabletop scene and a shelf scene for grasping with a Fetch mobile manipulator and a Franka Panda arm.
翻译:我们提出了一种新的机器人抓取轨迹优化方法,该方法基于机器人和任务空间的点云表示。在我们的方法中,机器人通过其连杆表面上的三维点来表示。机器人的任务空间由可从深度传感器获取的点云表示。利用点云表示,抓取中的目标到达可被表述为点匹配问题,而碰撞避免可通过在场景点的符号距离场中查询机器人点的符号距离值高效实现。由此,我们构建了一个约束非线性优化问题来求解关节运动与抓取规划联合问题。本方法的优势在于其点云表示具有通用性,可用于任何环境下的任意机器人。通过在桌面场景和货架场景中分别使用Fetch移动操作臂和Franka Panda机械臂进行抓取实验,我们验证了该方法的有效性。