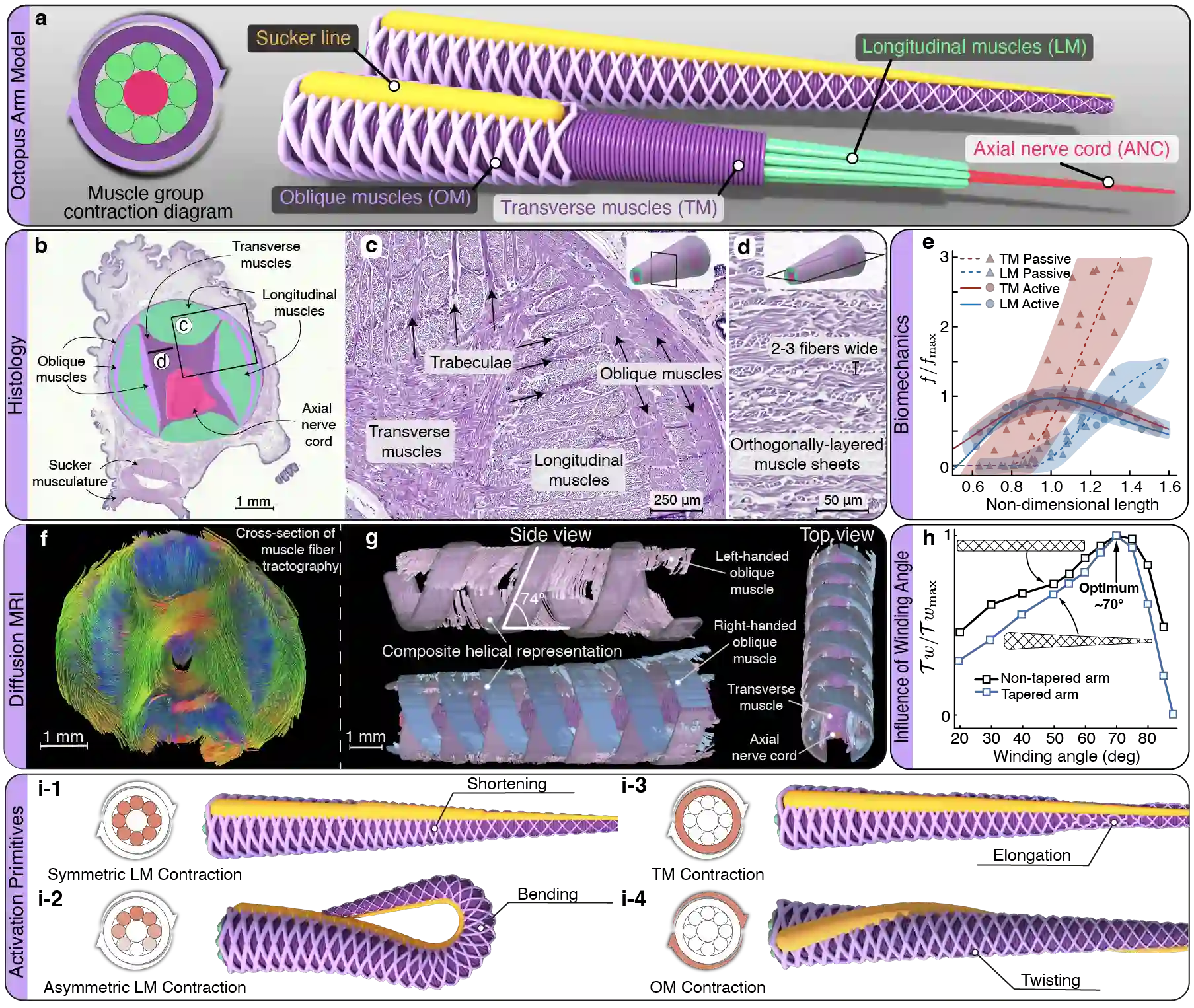
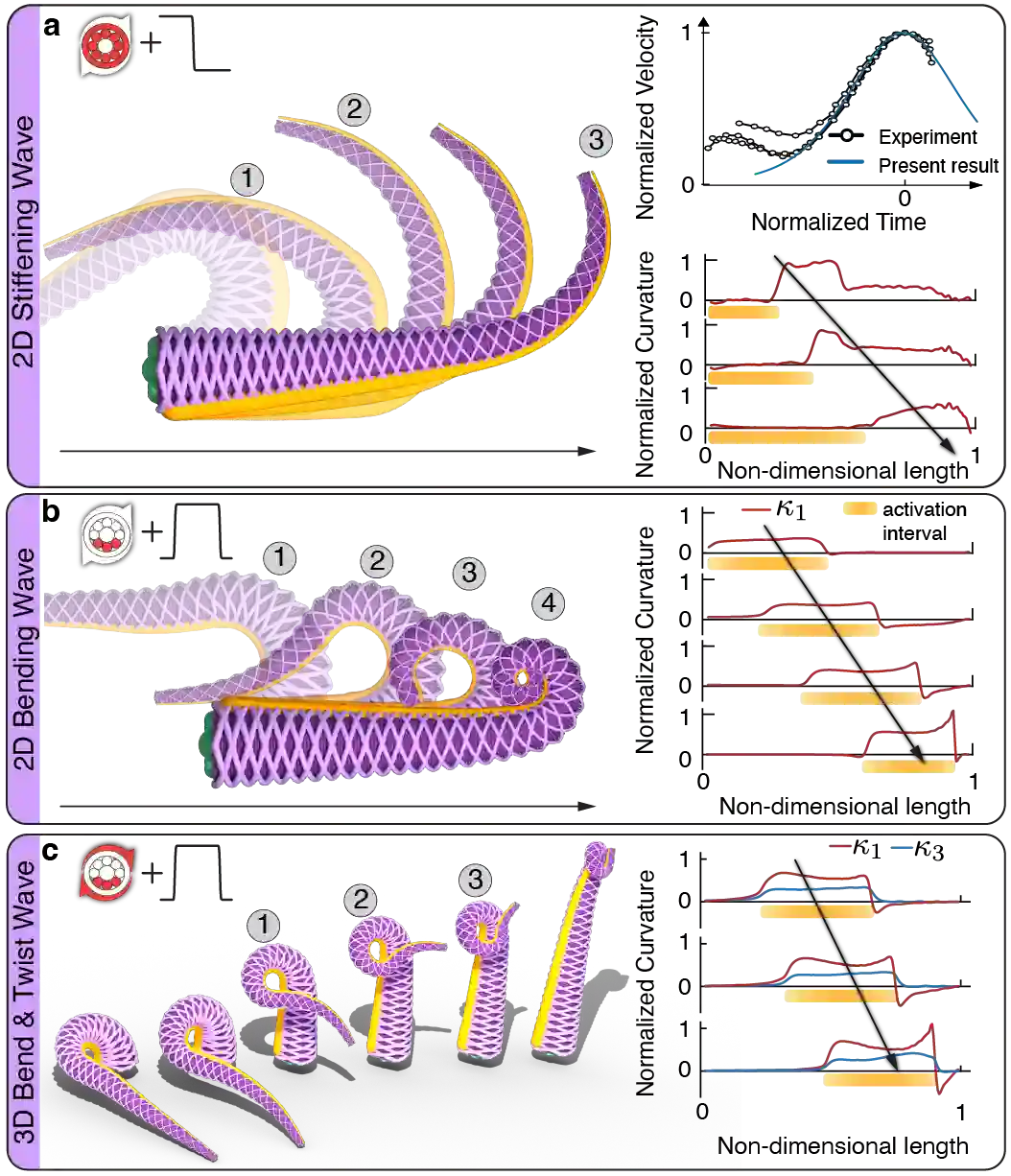
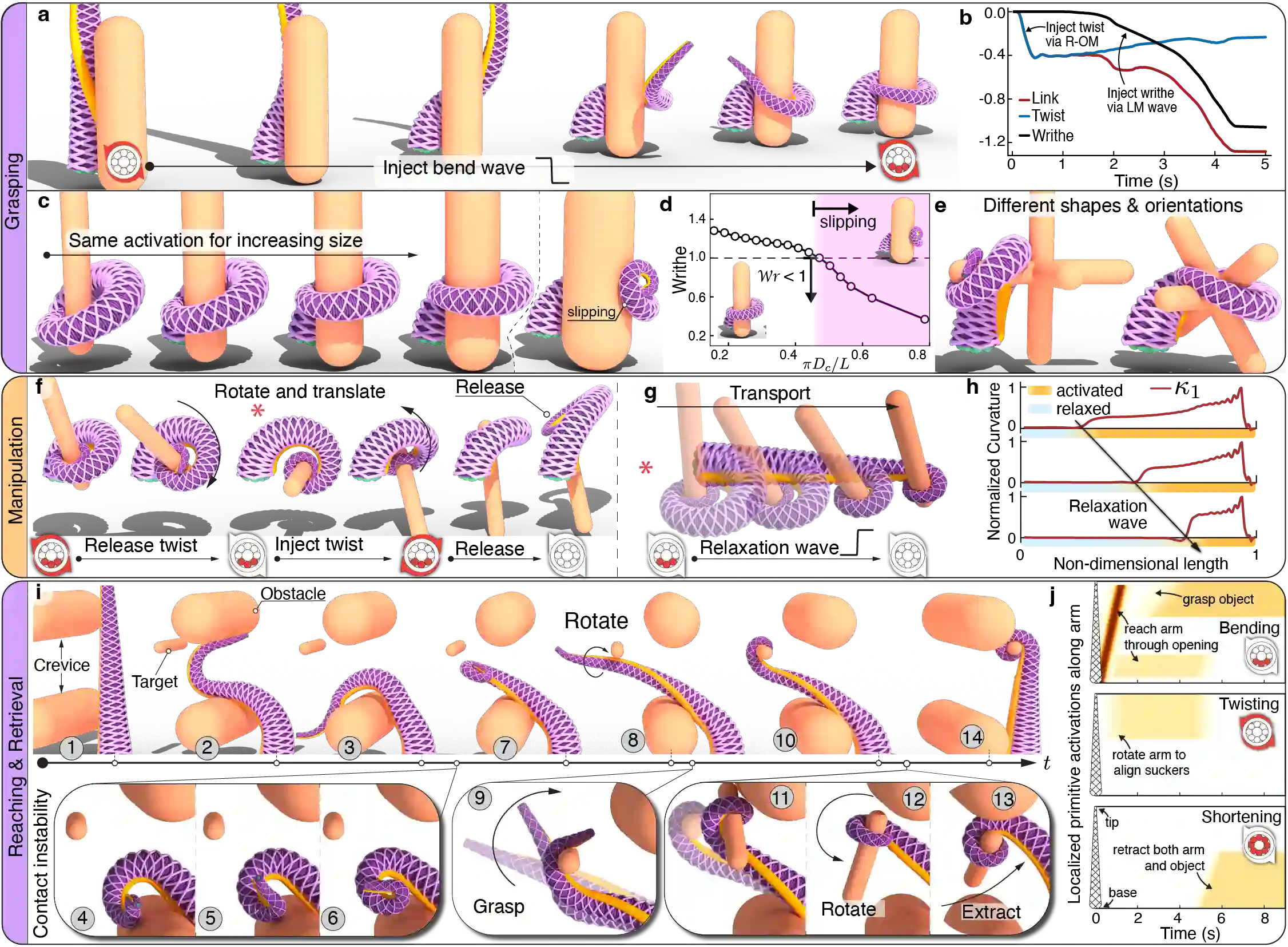
Muscular hydrostats, such as octopus arms or elephant trunks, lack bones entirely, endowing them with exceptional dexterity and reconfigurability. Key to their unmatched ability to control nearly infinite degrees of freedom is the architecture into which muscle fibers are weaved. Their arrangement is, effectively, the instantiation of a sophisticated mechanical program that mediates, and likely facilitates, the control and realization of complex, dynamic morphological reconfigurations. Here, by combining medical imaging, biomechanical data, live behavioral experiments and numerical simulations, we synthesize a model octopus arm entailing ~200 continuous muscles groups, and begin to unravel its complexity. We show how 3D arm motions can be understood in terms of storage, transport, and conversion of topological quantities, effected by simple muscle activation templates. These, in turn, can be composed into higher-level control strategies that, compounded by the arm's compliance, are demonstrated in a range of object manipulation tasks rendered additionally challenging by the need to appropriately align suckers, to sense and grasp. Overall, our work exposes broad design and algorithmic principles pertinent to muscular hydrostats, robotics, and dynamics, while significantly advancing our ability to model muscular structures from medical imaging, with potential implications for human health and care.
翻译:肌肉静水器(如章鱼手臂或大象鼻子)完全缺乏骨骼,赋予其非凡的灵巧性和可重构性。其能够控制近乎无限自由度的关键,在于肌肉纤维编织而成的架构。这种排列实质上是一种复杂机械程序的实例化,它调节并可能促进复杂动态形态重构的控制与实现。本研究通过结合医学成像、生物力学数据、活体行为实验和数值模拟,合成了一个包含约200个连续肌肉群的章鱼手臂模型,并开始揭示其复杂性。我们展示了三维手臂运动如何被理解为由简单的肌肉激活模板实现的拓扑量的存储、传输和转换。这些模板可进一步组合成更高层次的控制策略,并借助手臂的顺应性,在一系列物体操控任务中得以验证——这些任务因需要适当对齐吸盘以感知和抓取而更具挑战性。总体而言,我们的工作揭示了与肌肉静水器、机器人学和动力学相关的广泛设计及算法原理,同时显著提升了从医学成像中建模肌肉结构的能力,这对人类健康与护理具有潜在意义。