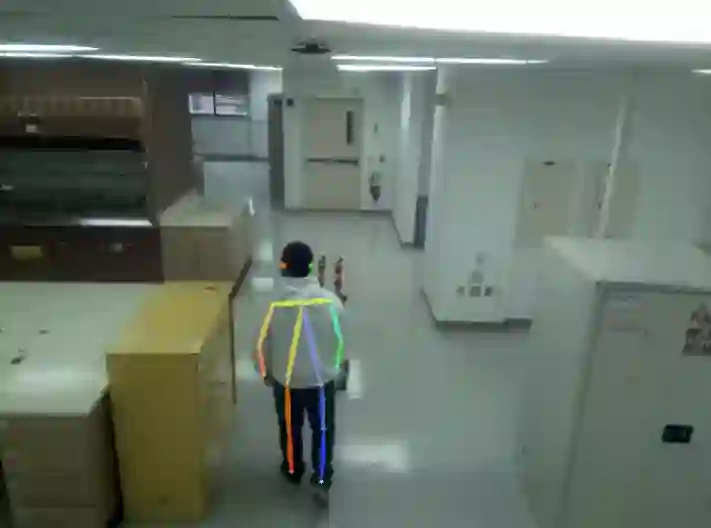
During the evacuation of a building, the rapid and accurate tracking of human evacuees can be used by a guide robot to increase the effectiveness of the evacuation [1],[2]. This paper introduces a near real-time human position tracking solution tailored for evacuation robots. Using a pose detector, our system first identifies human joints in the camera frame in near real-time and then translates the position of these pixels into real-world coordinates via a simple calibration process. We run multiple trials of the system in action in an indoor lab environment and show that the system can achieve an accuracy of 0.55 meters when compared to ground truth. The system can also achieve an average of 3 frames per second (FPS) which was sufficient for our study on robot-guided human evacuation. The potential of our approach extends beyond mere tracking, paving the way for evacuee motion prediction, allowing the robot to proactively respond to human movements during an evacuation.
翻译:在建筑物疏散过程中,引导机器人可利用对人类疏散人员的快速精准追踪来提升疏散效率[1],[2]。本文提出一种专为疏散机器人设计的近实时人体位置追踪解决方案。该系统首先通过姿态检测器在近实时条件下识别摄像头画面中的人体关节点,继而通过简易标定流程将这些像素坐标转换为真实世界坐标。我们在室内实验室环境中进行了多组系统运行测试,结果表明该系统相较于地面真实数据可达到0.55米的定位精度。系统平均处理速度可达每秒3帧(FPS),足以满足本研究中机器人引导疏散实验的需求。该方法的潜力不仅局限于追踪功能,更为预测疏散人员运动轨迹奠定基础,使机器人能够在疏散过程中对人类移动做出主动响应。