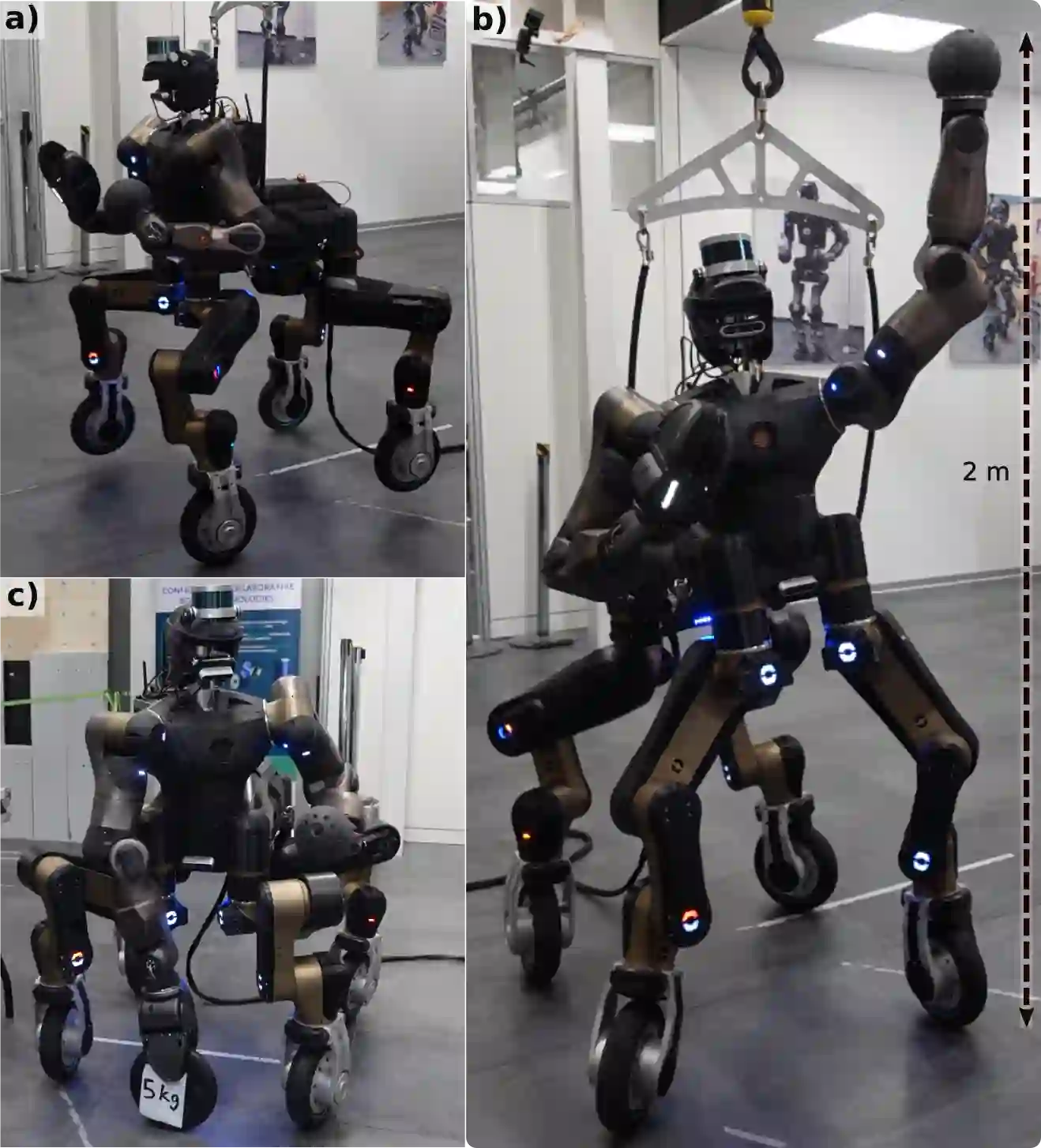
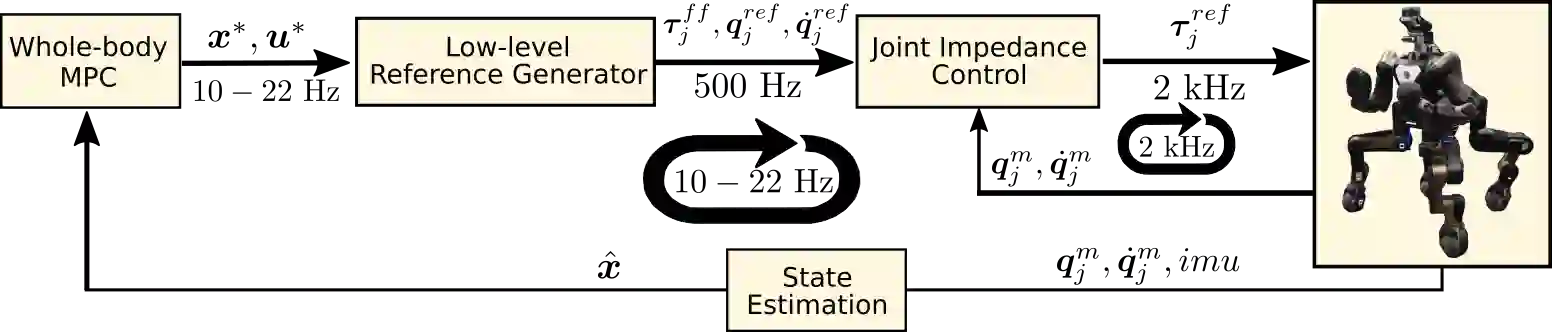
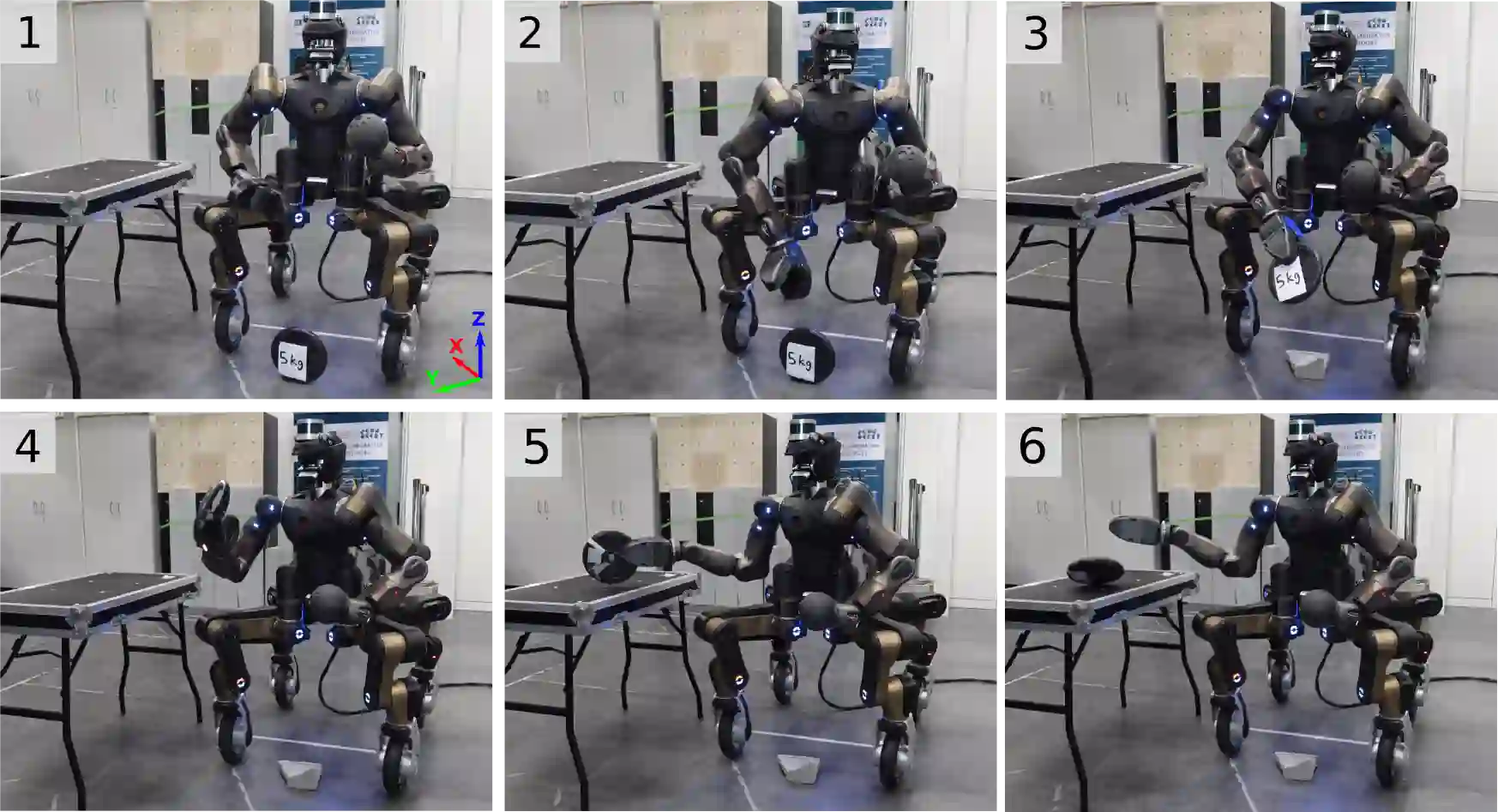
Recent progress in legged locomotion has rendered quadruped manipulators a promising solution for performing tasks that require both mobility and manipulation (\emph{loco-manipulation}). In the real world, task specifications and/or environment constraints may require the quadruped manipulator to be equipped with \emph{high redundancy} as well as \emph{whole-body} motion coordination capabilities. This work presents an experimental evaluation of a whole-body Model Predictive Control (MPC) framework achieving real-time performance on a dual-arm quadruped platform consisting of 37 actuated joints. To the best of our knowledge this is the legged manipulator with the highest number of joints to be controlled with real-time whole-body MPC so far. The computational efficiency of the MPC while considering the full robot kinematics and the centroidal dynamics model builds upon an open-source DDP-variant solver and a state-of-the-art optimal control problem formulation. Differently from previous works on quadruped manipulators, the MPC is directly interfaced with the low-level joint impedance controllers without the need of designing an instantaneous whole-body controller. The feasibility on the real hardware is showcased using the CENTAURO platform for the challenging task of picking a heavy object from the ground. Dynamic stepping (trotting) is also showcased for first time with this robot. The results highlight the potential of replanning with whole-body information in a predictive control loop.
翻译:近期腿部运动研究的进展使四足机器人成为执行兼具移动与操作能力任务(即移动-操作)的理想方案。在现实场景中,任务规范与/或环境约束要求四足机器人在具备高度冗余特性的同时,还需具备全身运动协调能力。本研究对一种全身模型预测控制框架进行了实验评估,该框架在包含37个驱动关节的双臂四足平台上实现了实时控制性能。据我们所知,这是目前通过实时全身MPC控制的关节数最多的腿部机器人。该MPC在考虑完整机器人运动学与质心动力学模型时展现的计算效率,得益于开源的DDP变体求解器与最优控制问题的最先进形式化方法。与先前四足机械臂研究不同,本MPC直接与底层关节阻抗控制器交互,无需设计瞬时全身控制器。通过CENTAURO平台执行从地面拾取重物的挑战性任务,验证了其在真实硬件上的可行性;同时首次在该机器人上实现了动态步态(小跑步态)演示。结果表明,在预测控制回路中利用全身信息进行重规划具有显著潜力。