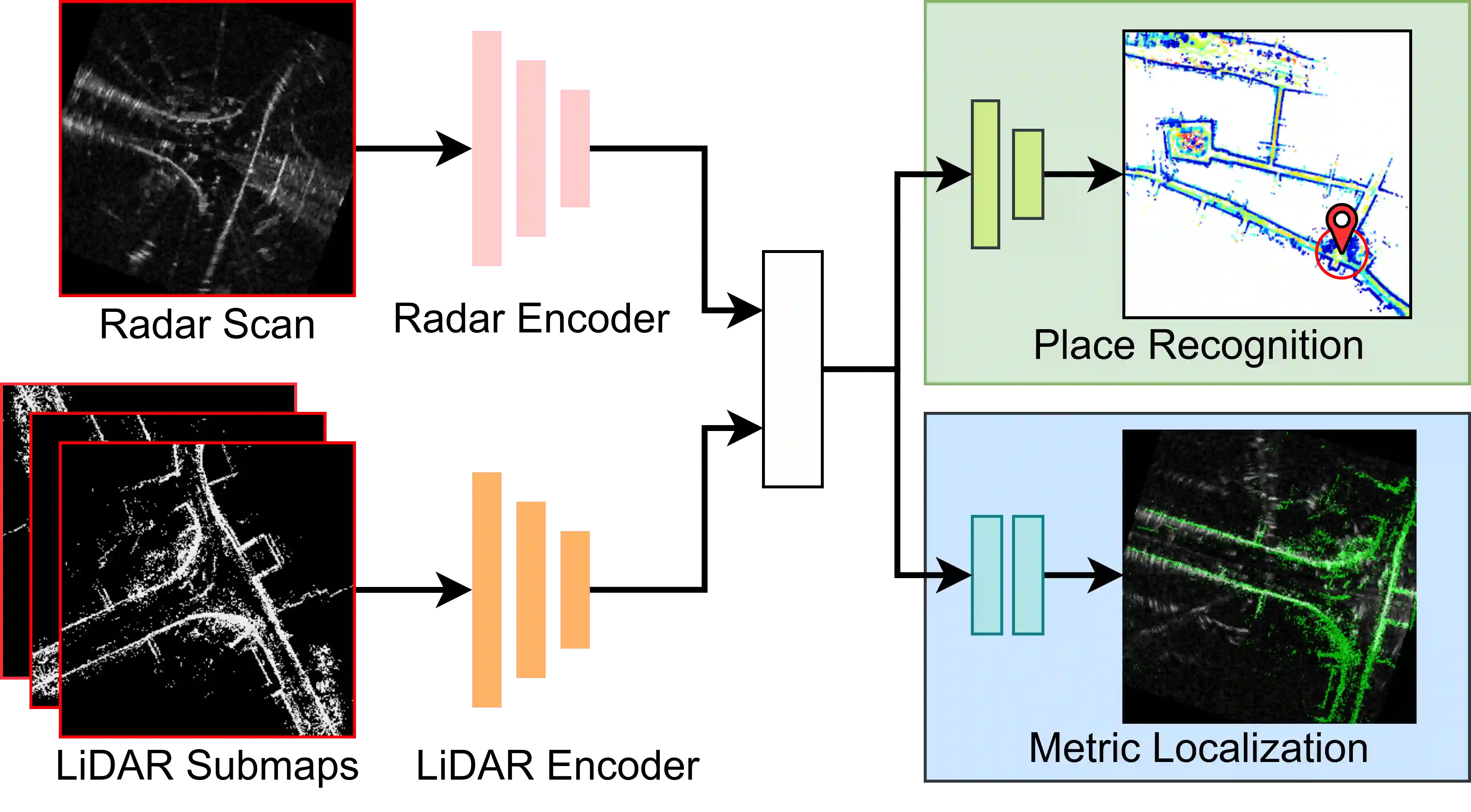
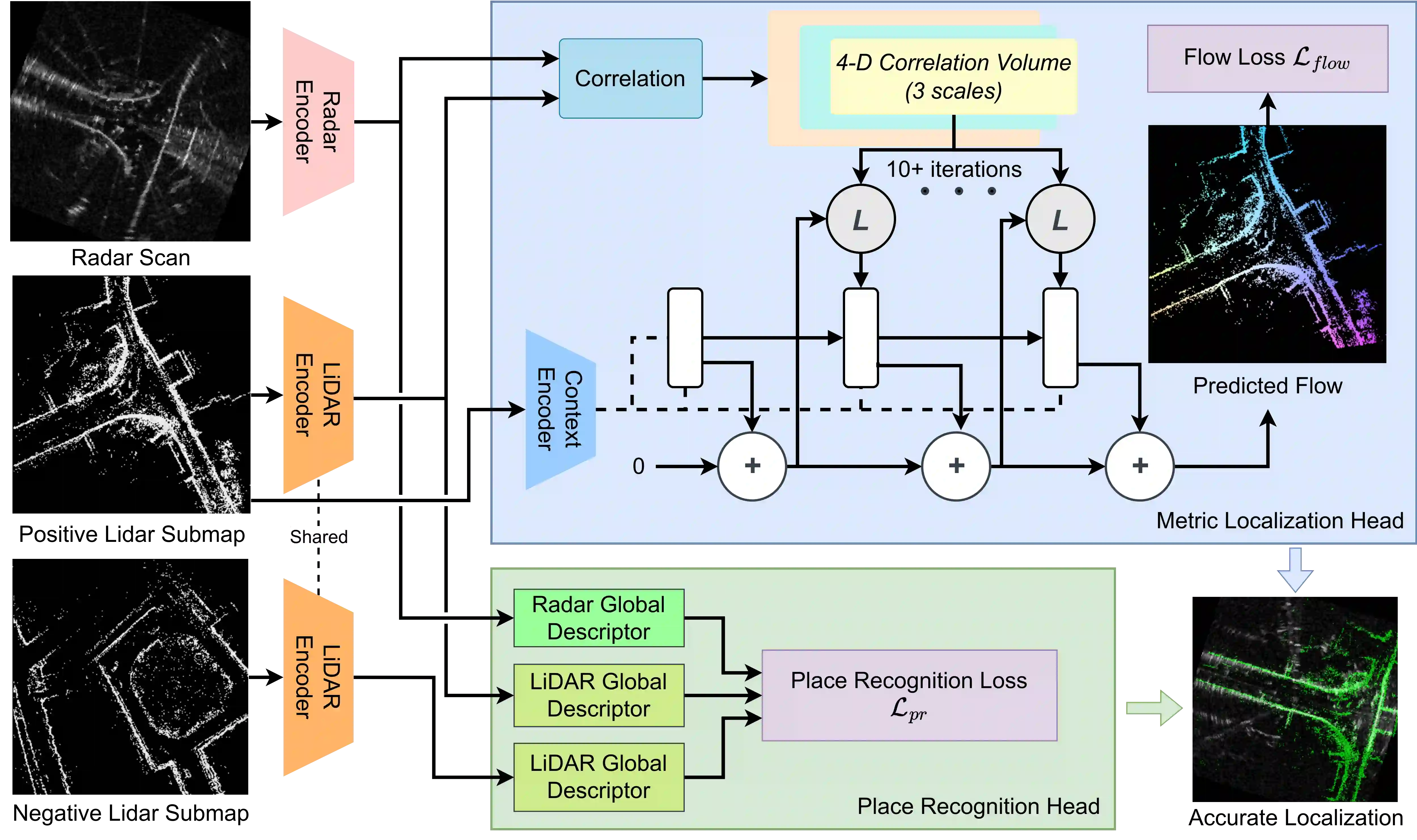
Localization is paramount for autonomous robots. While camera and LiDAR-based approaches have been extensively investigated, they are affected by adverse illumination and weather conditions. Therefore, radar sensors have recently gained attention due to their intrinsic robustness to such conditions. In this paper, we propose RaLF, a novel deep neural network-based approach for localizing radar scans in a LiDAR map of the environment, by jointly learning to address both place recognition and metric localization. RaLF is composed of radar and LiDAR feature encoders, a place recognition head that generates global descriptors, and a metric localization head that predicts the 3-DoF transformation between the radar scan and the map. We tackle the place recognition task by learning a shared embedding space between the two modalities via cross-modal metric learning. Additionally, we perform metric localization by predicting pixel-level flow vectors that align the query radar scan with the LiDAR map. We extensively evaluate our approach on multiple real-world driving datasets and show that RaLF achieves state-of-the-art performance for both place recognition and metric localization. Moreover, we demonstrate that our approach can effectively generalize to different cities and sensor setups than the ones used during training. We make the code and trained models publicly available at http://ralf.cs.uni-freiburg.de.
翻译:定位对于自主机器人至关重要。尽管基于相机和激光雷达的方法已得到广泛研究,但它们易受恶劣照明和天气条件的影响。因此,雷达传感器因其对这些条件的固有鲁棒性而近年受到关注。本文提出RaLF,一种基于深度神经网络的新方法,通过联合学习解决地点识别与度量定位问题,实现在环境激光雷达地图中对雷达扫描数据进行定位。RaLF由雷达与激光雷达特征编码器、生成全局描述子的地点识别头以及预测雷达扫描与地图间3自由度变换的度量定位头组成。我们通过跨模态度量学习,学习两种模态间的共享嵌入空间,从而解决地点识别任务。此外,我们通过预测像素级流向量(使查询雷达扫描与激光雷达地图对齐)来实现度量定位。我们在多个真实驾驶数据集上进行了广泛评估,结果表明RaLF在地点识别与度量定位任务上均达到最先进的性能。同时,我们证明该方法能有效泛化至训练过程中未涉及的不同城市与传感器配置。代码与训练模型已在http://ralf.cs.uni-freiburg.de公开提供。