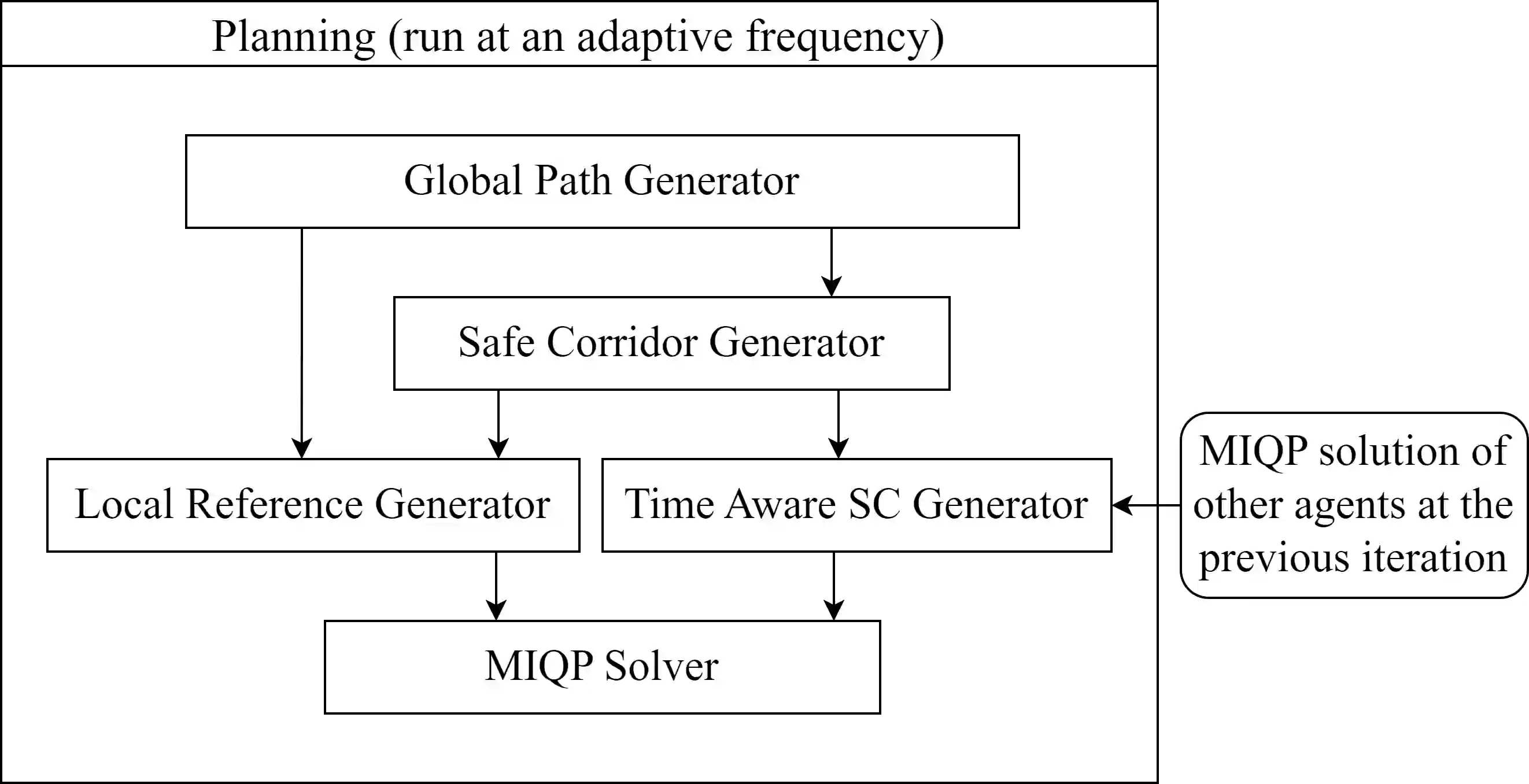
There are many industrial, commercial and social applications for multi-agent planning for multirotors such as autonomous agriculture, infrastructure inspection and search and rescue. Thus, improving on the state-of-the-art of multi-agent planning to make it a viable real-world solution is of great benefit. In this work, we propose a new method for multi-agent planning in a static environment that improves our previous work by making it fully online as well as robust to communication latency. The proposed framework generates a global path and a Safe Corridor to avoid static obstacles in an online fashion (generated offline in our previous work). It then generates a time-aware Safe Corridor which takes into account the future positions of other agents to avoid intra-agent collisions. The time-aware Safe Corridor is given with a local reference trajectory to an MIQP (Mixed-Integer Quadratic Problem)/MPC (Model Predictive Control) solver that outputs a safe and optimal trajectory. The planning frequency is adapted to account for communication delays. The proposed method is fully online, real-time, decentralized, and synchronous. It is compared to 3 recent state-of-the-art methods in simulations. It outperforms all methods in robustness and safety as well as flight time. It also outperforms the only other state-of-the-art latency robust method in computation time.
翻译:多旋翼无人机的多智能体规划在自主农业、基础设施巡检及搜救等工业、商业及社会场景中具有广泛应用。因此,改进最先进的多智能体规划技术以使其成为可行的实际解决方案具有重要价值。本文提出一种静态环境下的多智能体规划新方法,该方法通过实现全在线运行及对通信延迟的鲁棒性,改进了我们先前的工作。所提框架在线生成全局路径与安全走廊(先前工作为离线生成)以规避静态障碍物,随后构建时间感知安全走廊——该走廊通过考虑其他智能体的未来位置避免智能体间碰撞。时间感知安全走廊与局部参考轨迹一同输入至MIQP(混合整数二次规划)/MPC(模型预测控制)求解器,输出安全且最优的轨迹。规划频率根据通信延迟自适应调整。该方法具备全在线、实时、分布式及同步特性。在仿真中与三种最新方法进行对比,其在鲁棒性、安全性及飞行时间上均优于所有对比方法。在计算时间方面,该方法同样优于唯一具备延迟鲁棒性的其他先进方法。