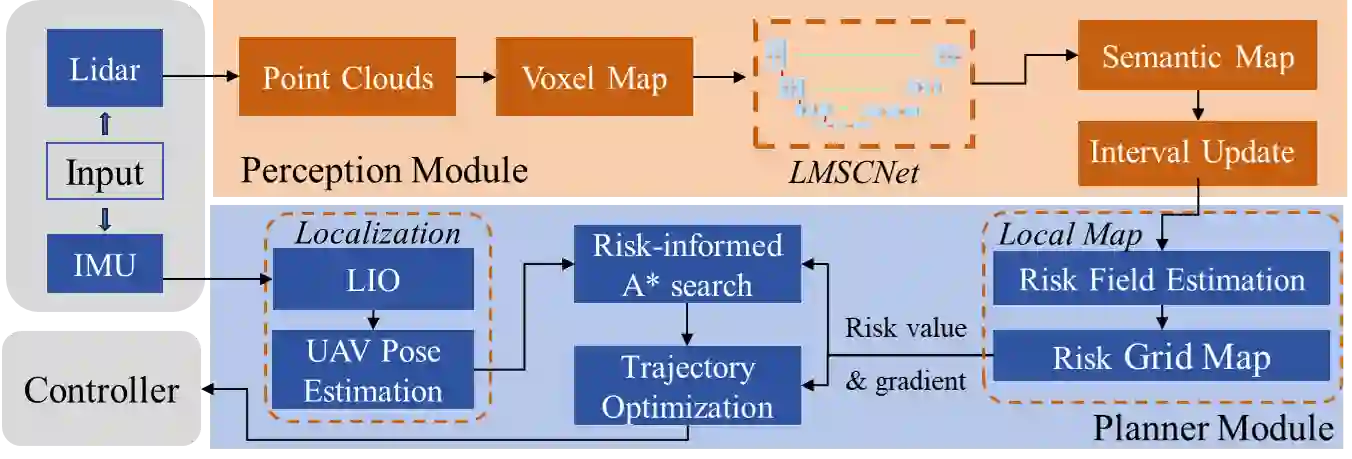
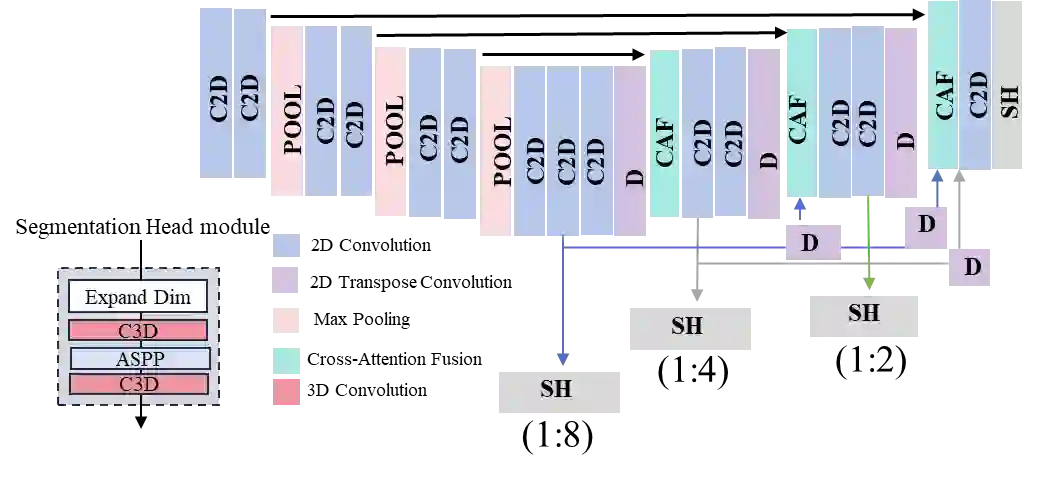
Existing aerial robot navigation systems typically plan paths around static and dynamic obstacles, but fail to adapt when a static obstacle suddenly moves. Integrating environmental semantic awareness enables estimation of potential risks posed by suddenly moving obstacles. In this paper, we propose RA- Nav, a risk-aware navigation framework based on semantic segmentation. A lightweight multi-scale semantic segmentation network identifies obstacle categories in real time. These obstacles are further classified into three types: stationary, temporarily static, and dynamic. For each type, corresponding risk estimation functions are designed to enable real-time risk prediction, based on which a complete local risk map is constructed. Based on this map, the risk-informed path search algorithm is designed to guarantee planning that balances path efficiency and safety. Trajectory optimization is then applied to generate trajectories that are safe, smooth, and dynamically feasible. Comparative simulations demonstrate that RA-Nav achieves higher success rates than baselines in sudden obstacle state transition scenarios. Its effectiveness is further validated in simulations using real- world data.
翻译:现有的空中机器人导航系统通常围绕静态和动态障碍物规划路径,但当静态障碍物突然移动时则无法适应。集成环境语义感知能力可以估计突然移动的障碍物带来的潜在风险。本文提出RA-Nav,一种基于语义分割的风险感知导航框架。一个轻量级多尺度语义分割网络实时识别障碍物类别。这些障碍物被进一步分为三类:静止型、暂时静态型和动态型。针对每种类型,设计了相应的风险估计函数以实现实时风险预测,并在此基础上构建完整的局部风险地图。基于此地图,设计了风险感知路径搜索算法,以保证在路径效率与安全性之间取得平衡的规划。随后应用轨迹优化以生成安全、平滑且动力学可行的轨迹。对比仿真表明,在障碍物状态突然转变的场景中,RA-Nav相比基线方法实现了更高的成功率。其有效性在使用真实世界数据的仿真中得到了进一步验证。