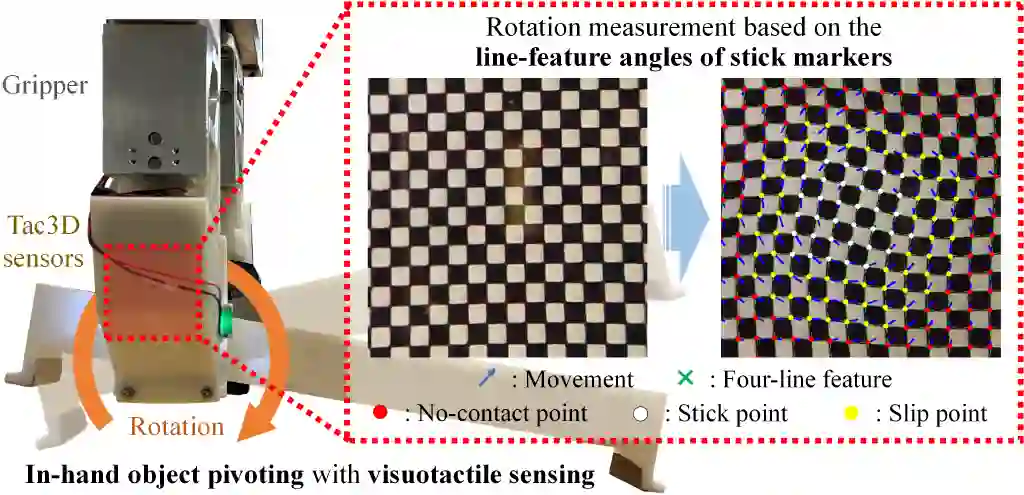
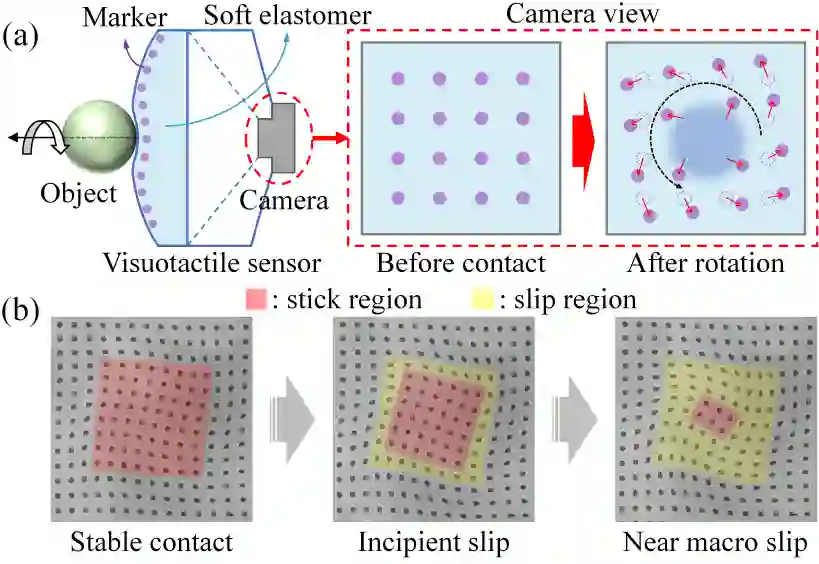
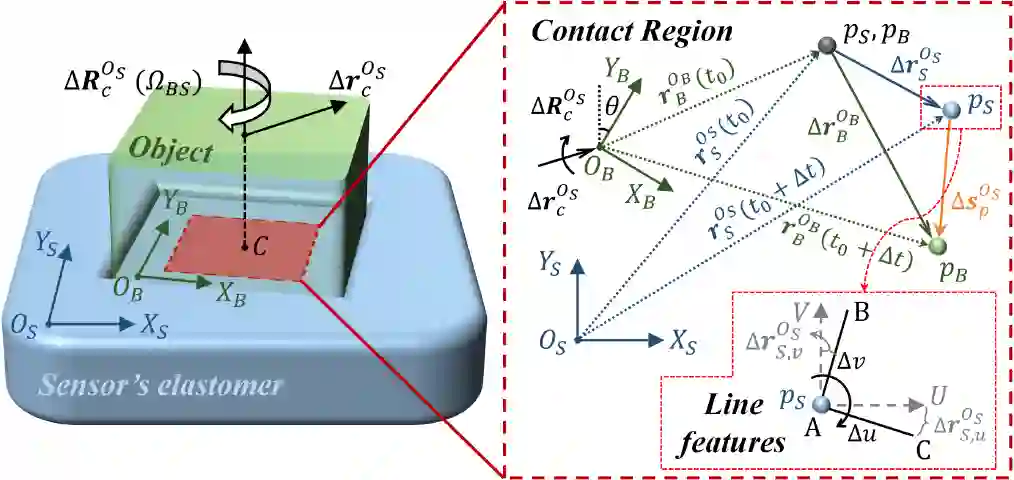
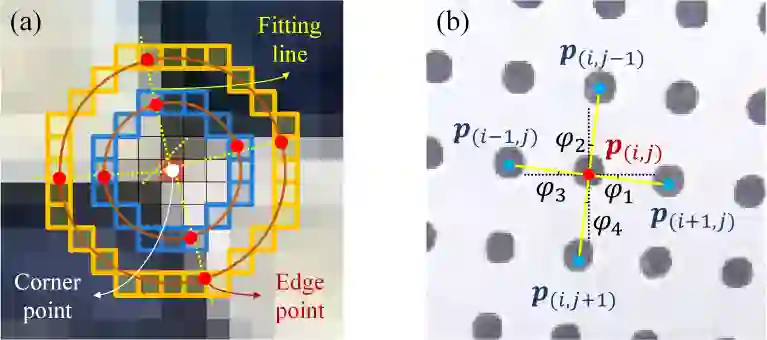
In typical in-hand manipulation tasks represented by object pivoting, the real-time perception of rotational slippage has been proven beneficial for improving the dexterity and stability of robotic hands. An effective strategy is to obtain the contact properties for measuring rotation angle through visuotactile sensing. However, existing methods for rotation estimation did not consider the impact of the incipient slip during the pivoting process, which introduces measurement errors and makes it hard to determine the boundary between stable contact and macro slip. This paper describes a generalized 2-d contact model under pivoting, and proposes a rotation measurement method based on the line-features in the stick region. The proposed method was applied to the Tac3D vision-based tactile sensors using continuous marker patterns. Experiments show that the rotation measurement system could achieve an average static measurement error of 0.17 degree and an average dynamic measurement error of 1.34 degree. Besides, the proposed method requires no training data and can achieve real-time sensing during the in-hand object pivoting.
翻译:在以物体旋转为代表的典型手内操作任务中,旋转滑移的实时感知已被证明有助于提升机器手的灵活性与稳定性。通过触觉视觉传感获取接触特性以测量旋转角度是一种有效策略。然而,现有旋转估计算法未考虑旋转过程中初期滑移的影响,导致测量误差增大,且难以区分稳定接触与宏观滑移的边界。本文建立了旋转操作下的广义二维接触模型,并提出基于粘滞区内线特征的旋转测量方法。该方法被应用于采用连续标记图案的Tac3D视觉触觉传感器。实验表明,该旋转测量系统可实现平均静态测量误差0.17度,平均动态测量误差1.34度。此外,该方法无需训练数据,可在手内物体旋转过程中实现实时感知。