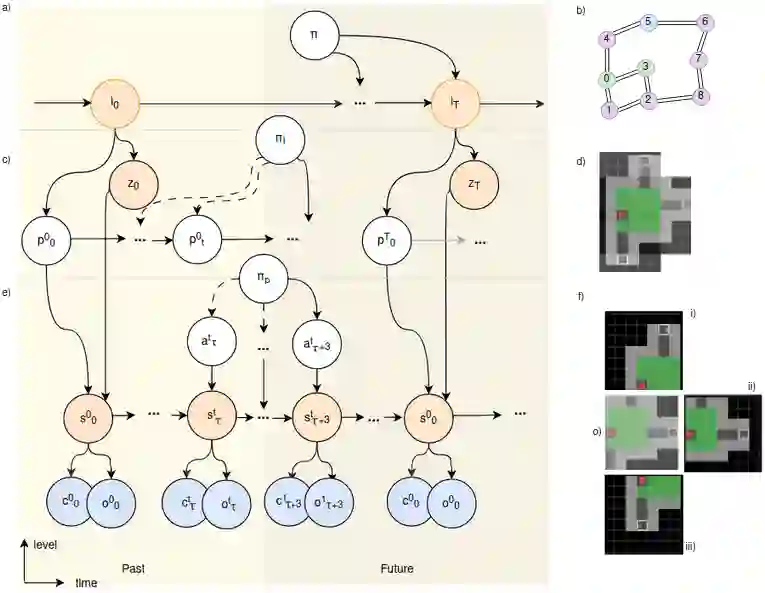
Cognitive maps play a crucial role in facilitating flexible behaviour by representing spatial and conceptual relationships within an environment. The ability to learn and infer the underlying structure of the environment is crucial for effective exploration and navigation. This paper introduces a hierarchical active inference model addressing the challenge of inferring structure in the world from pixel-based observations. We propose a three-layer hierarchical model consisting of a cognitive map, an allocentric, and an egocentric world model, combining curiosity-driven exploration with goal-oriented behaviour at the different levels of reasoning from context to place to motion. This allows for efficient exploration and goal-directed search in room-structured mini-grid environments.
翻译:认知地图通过表征环境中的空间和概念关系,在促进灵活行为方面发挥着关键作用。学习并推断环境的潜在结构对于高效探索与导航至关重要。本文提出了一种层次化主动推理模型,旨在解决从像素级观测推断世界结构的挑战。我们构建了一个包含认知地图、异我中心世界模型和自我中心世界模型的三层层次模型,将好奇心驱动的探索与目标导向行为相结合,在从情境到场所再到运动的不同推理层级上协同作用。这使得在具有房间结构的微型网格环境中能够实现高效探索与目标导向搜索。