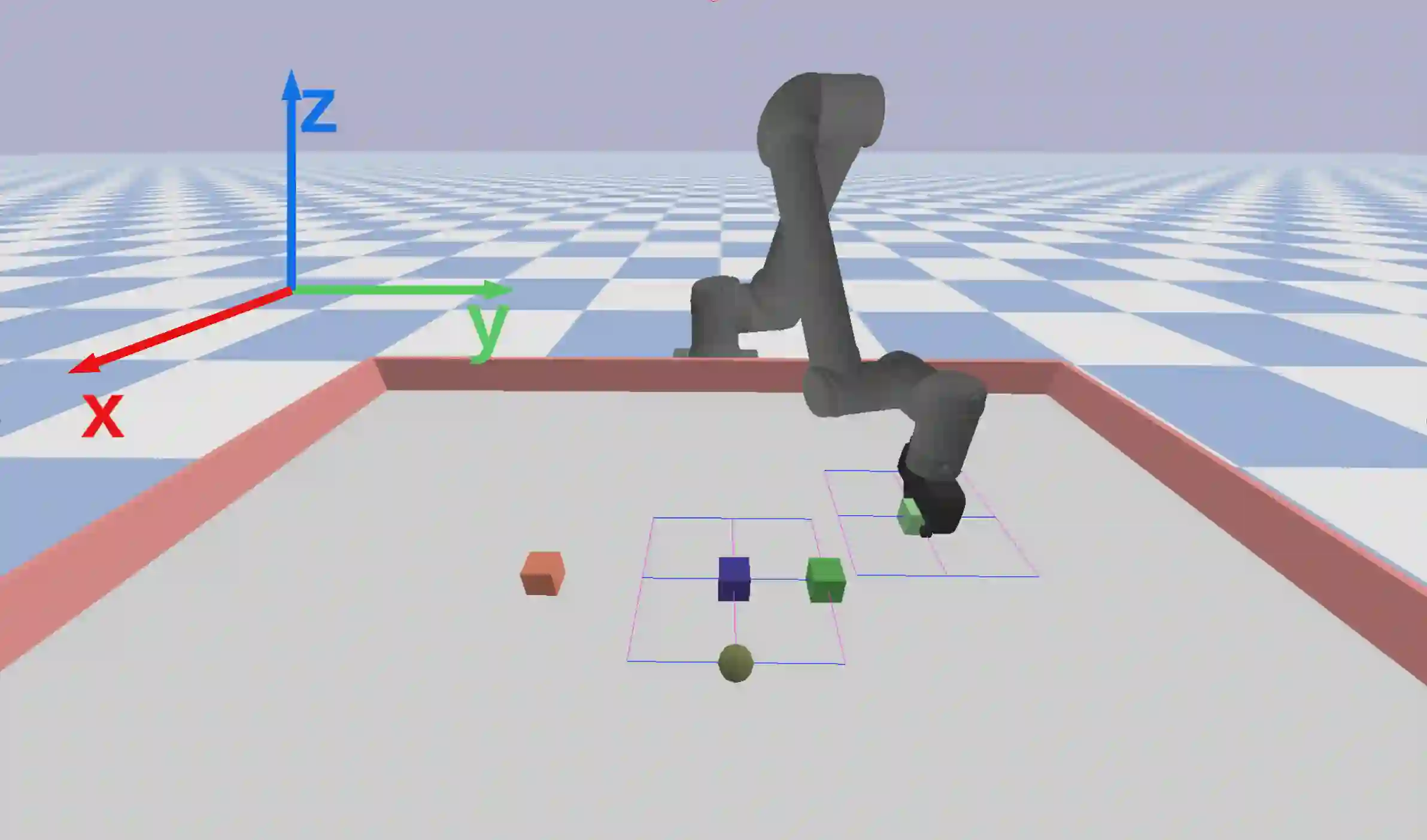
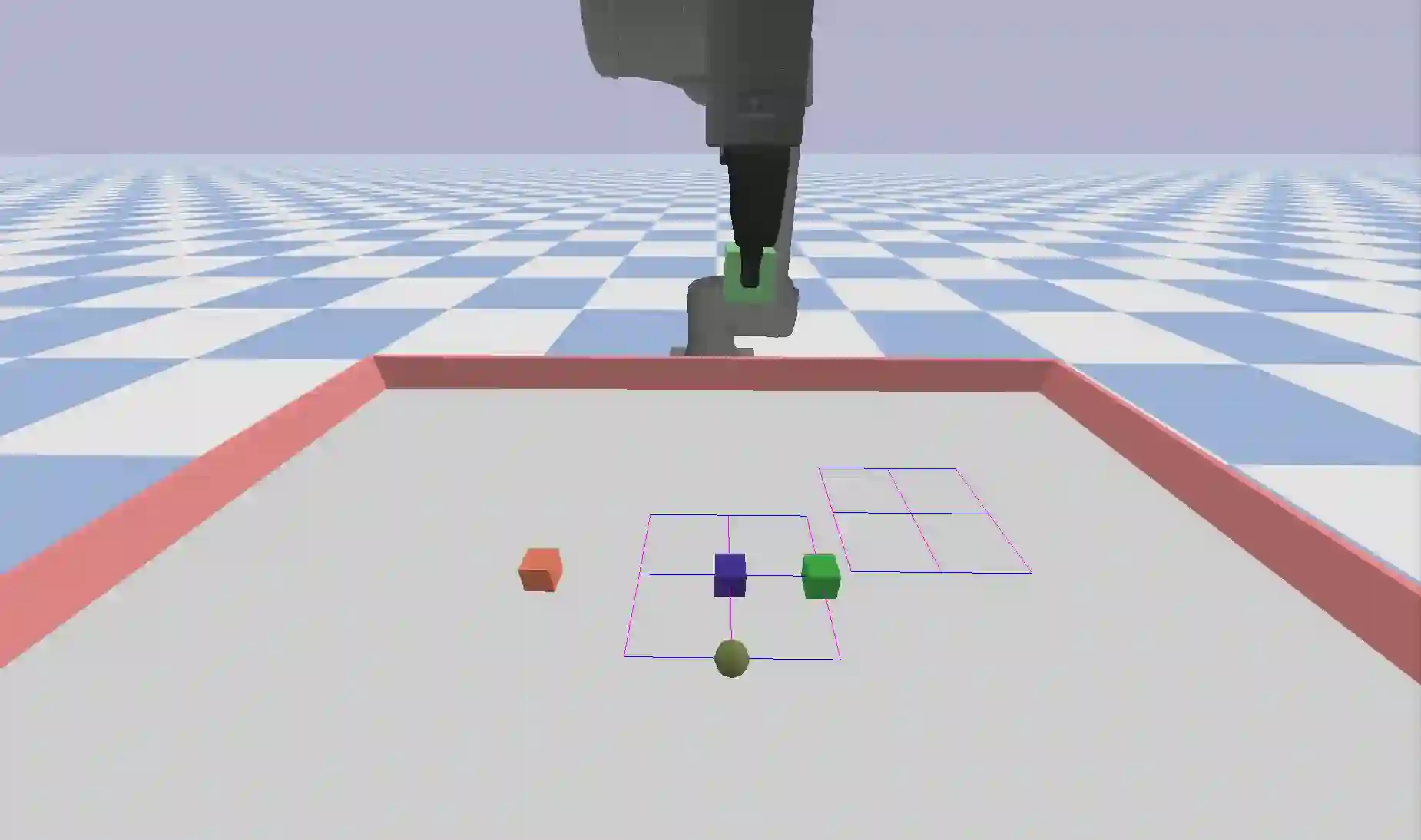
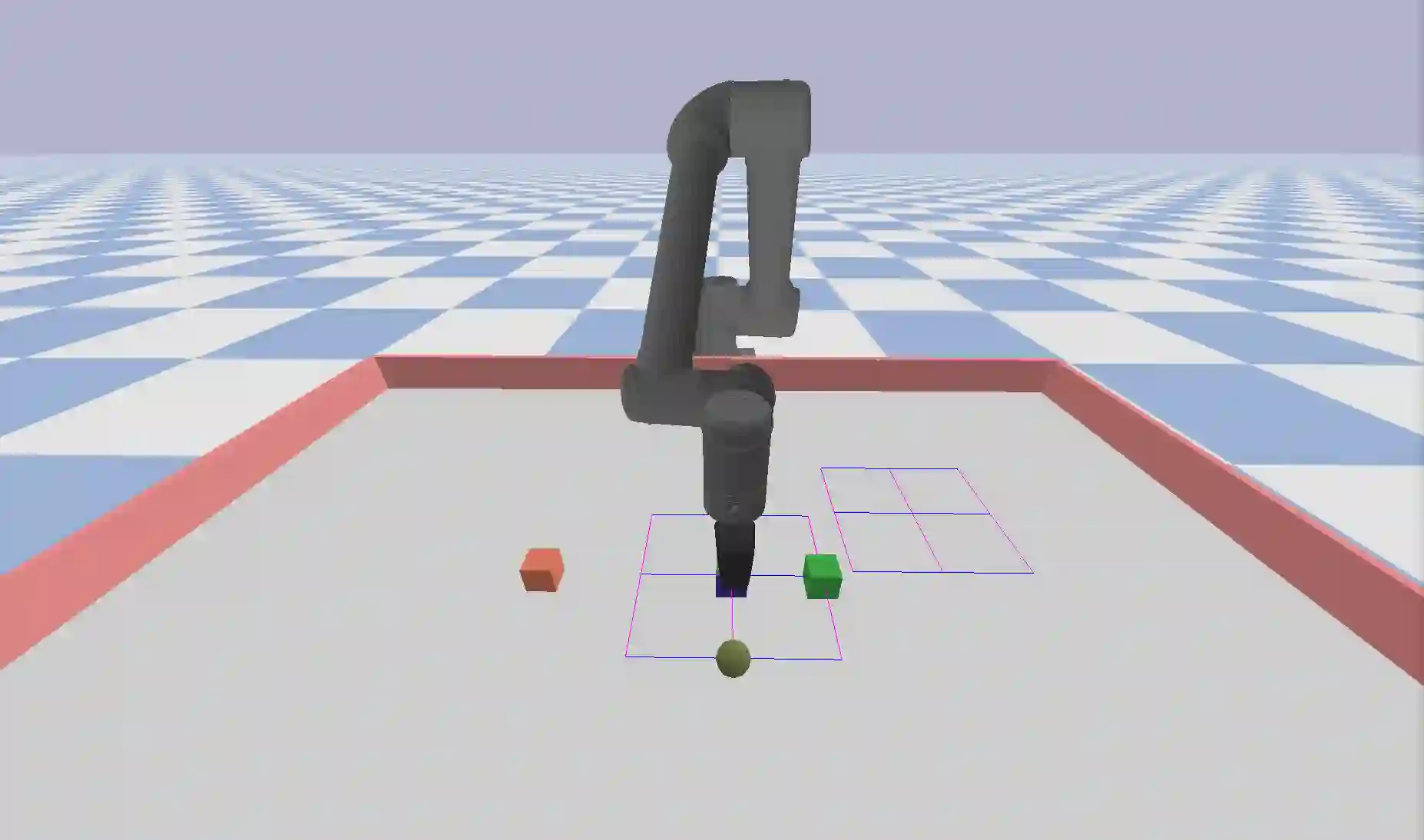
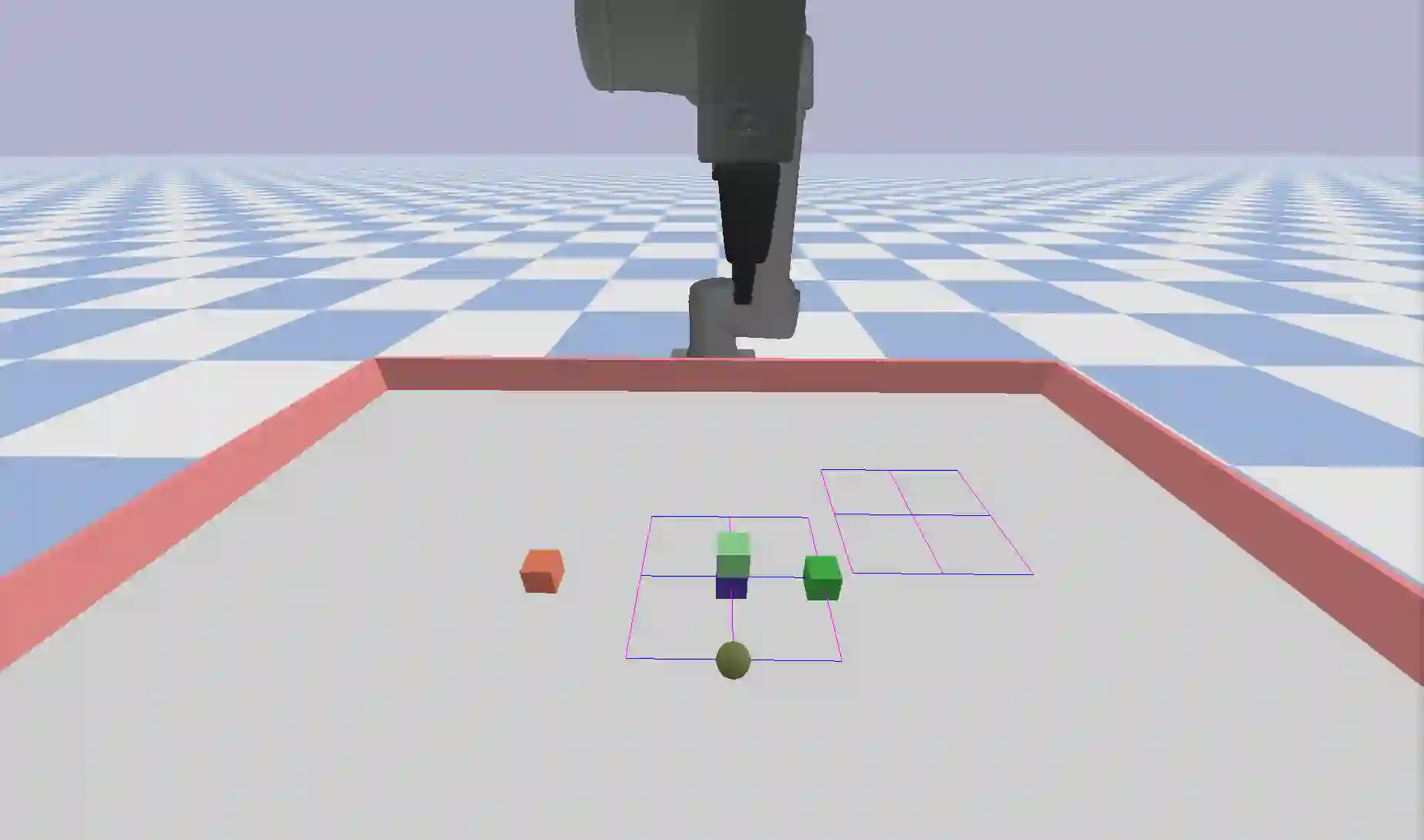
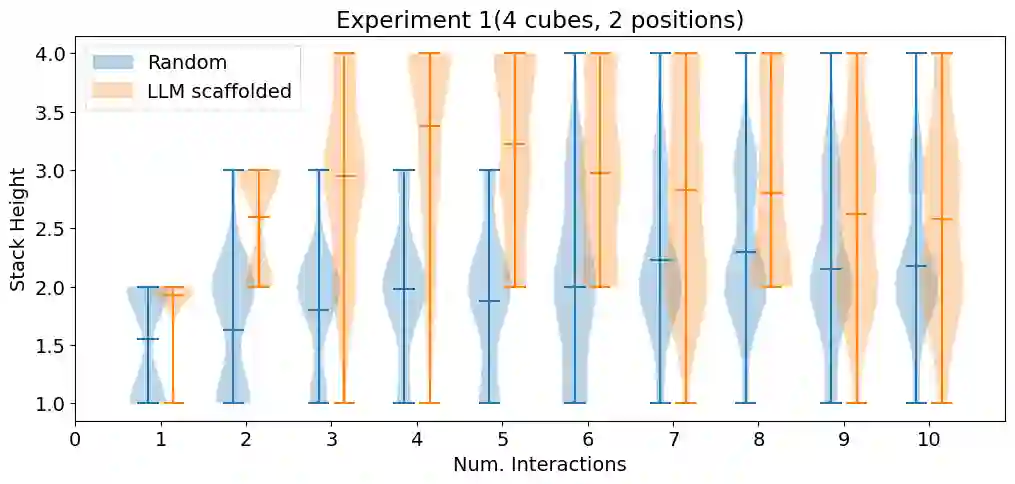
Exploratoration and self-observation are key mechanisms of infant sensorimotor development. These processes are further guided by parental scaffolding accelerating skill and knowledge acquisition. In developmental robotics, this approach has been adopted often by having a human acting as the source of scaffolding. In this study, we investigate whether Large Language Models (LLMs) can act as a scaffolding agent for a robotic system that aims to learn to predict the effects of its actions. To this end, an object manipulation setup is considered where one object can be picked and placed on top of or in the vicinity of another object. The adopted LLM is asked to guide the action selection process through algorithmically generated state descriptions and action selection alternatives in natural language. The simulation experiments that include cubes in this setup show that LLM-guided (GPT3.5-guided) learning yields significantly faster discovery of novel structures compared to random exploration. However, we observed that GPT3.5 fails to effectively guide the robot in generating structures with different affordances such as cubes and spheres. Overall, we conclude that even without fine-tuning, LLMs may serve as a moderate scaffolding agent for improving robot learning, however, they still lack affordance understanding which limits the applicability of the current LLMs in robotic scaffolding tasks.
翻译:探索与自我观察是婴儿感觉运动发展的关键机制,这些过程进一步受到父母支架作用的引导,加速了技能与知识的获取。在发育机器人学中,这种方法常通过人类作为支架来源来实施。本研究探讨了大语言模型(LLMs)能否为旨在学习预测自身动作效果的机器人系统充当支架代理。为此,我们设计了一个物体操作场景,其中可将一个物体拾起并放置于另一物体之上或附近。所采用的大语言模型需通过算法生成的状态描述及自然语言形式的动作选择方案来指导动作选择过程。包含立方体的仿真实验表明,与随机探索相比,大语言模型引导的(GPT3.5引导的)学习能显著加快新结构的发现速度。然而,我们观察到GPT3.5在引导机器人生成具有不同功能属性(如立方体和球体)的结构时效果不佳。总体而言,我们得出结论:即使未经微调,大语言模型也能作为改善机器人学习的适度支架代理,但其仍缺乏功能属性理解能力,这限制了当前大语言模型在机器人支架任务中的适用性。