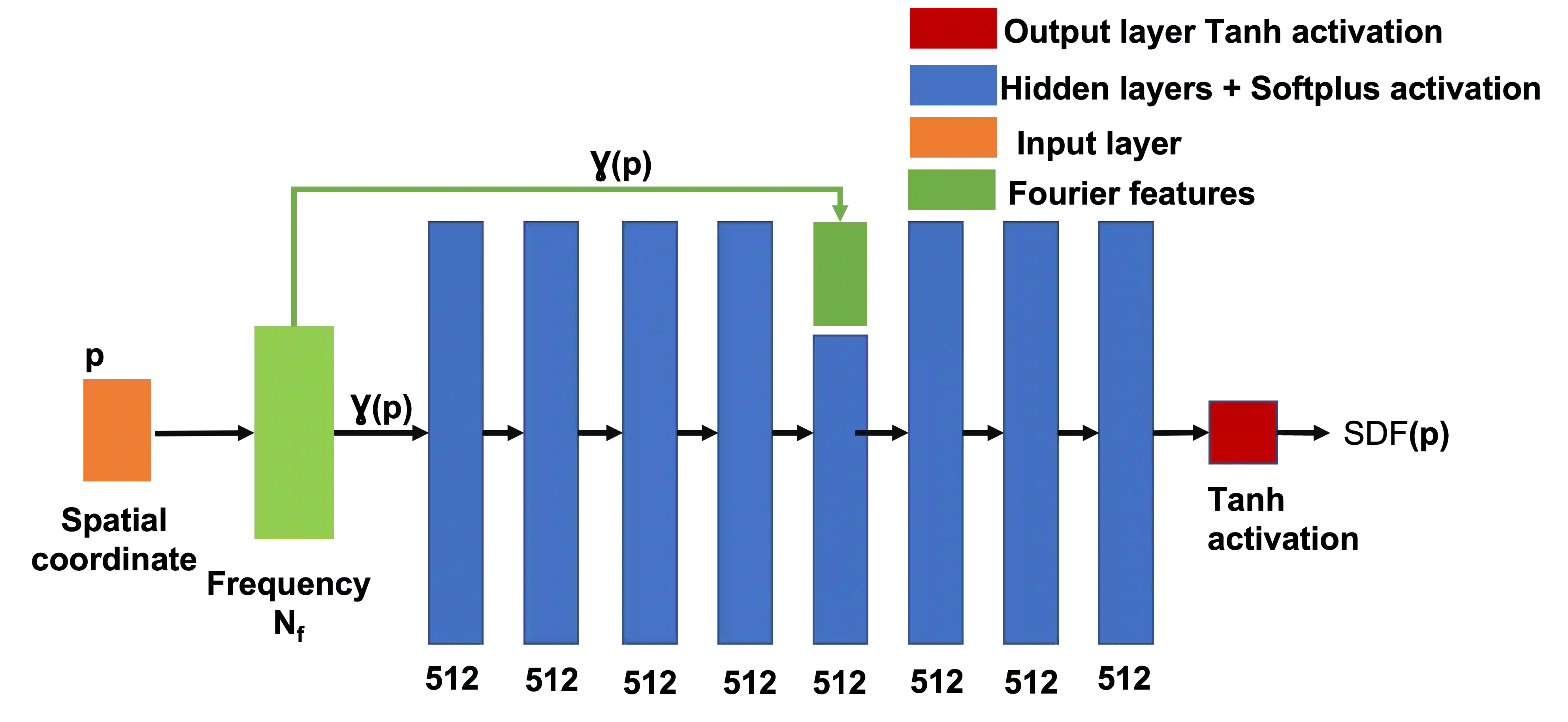
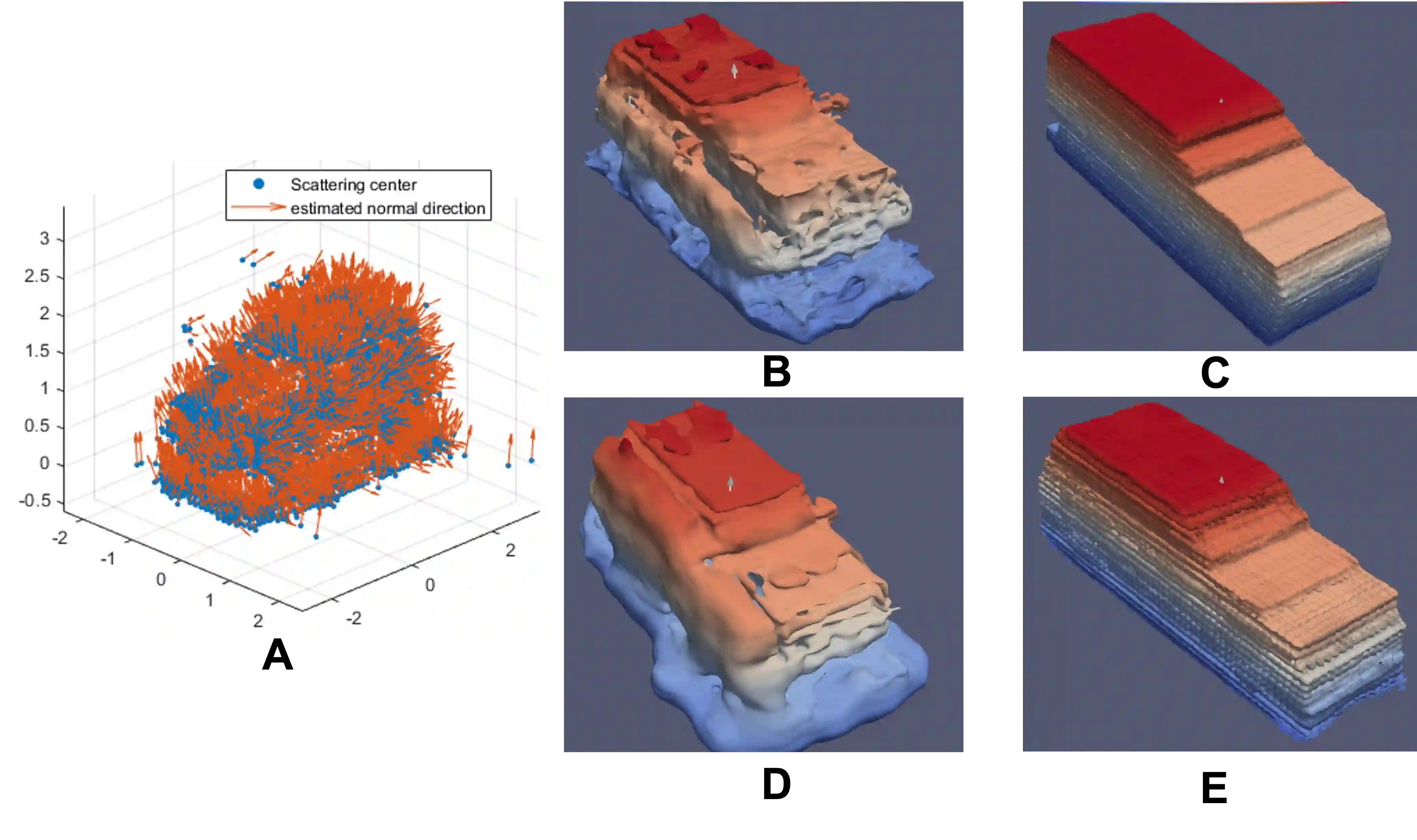
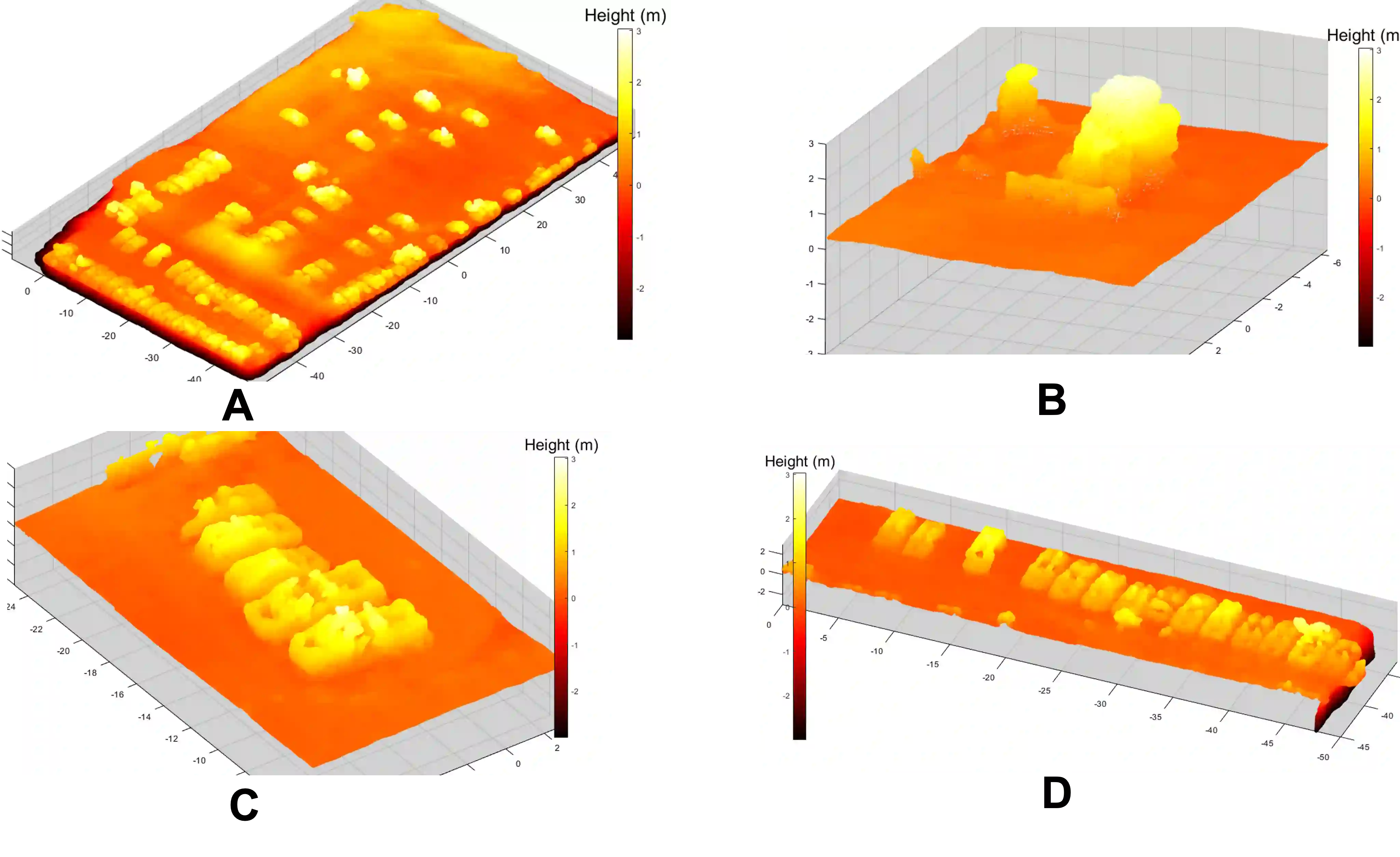
Synthetic aperture radar (SAR) is a tomographic sensor that measures 2D slices of the 3D spatial Fourier transform of the scene. In many operational scenarios, the measured set of 2D slices does not fill the 3D space in the Fourier domain, resulting in significant artifacts in the reconstructed imagery. Traditionally, simple priors, such as sparsity in the image domain, are used to regularize the inverse problem. In this paper, we review our recent work that achieves state-of-the-art results in 3D SAR imaging employing neural structures to model the surface scattering that dominates SAR returns. These neural structures encode the surface of the objects in the form of a signed distance function learned from the sparse scattering data. Since estimating a smooth surface from a sparse and noisy point cloud is an ill-posed problem, we regularize the surface estimation by sampling points from the implicit surface representation during the training step. We demonstrate the model's ability to represent target scattering using measured and simulated data from single vehicles and a larger scene with a large number of vehicles. We conclude with future research directions calling for methods to learn complex-valued neural representations to enable synthesizing new collections from the volumetric neural implicit representation.
翻译:合成孔径雷达(SAR)是一种层析成像传感器,能够测量场景三维空间傅里叶变换的二维切片。在许多实际应用场景中,所测量的二维切片集合无法填满傅里叶域的三维空间,导致重建图像中存在显著伪影。传统方法通常采用简单先验(如图像域稀疏性)对逆问题进行正则化。本文回顾了我们近期利用神经网络结构对主导SAR回波的表面散射进行建模的研究,该研究在三维SAR成像中取得了最先进的成果。这些神经网络结构以符号距离函数的形式编码目标表面,该函数从稀疏散射数据中学习得到。由于从稀疏且含噪声的点云中估计光滑表面是一个不适定问题,我们在训练阶段通过从隐式表面表示中采样点来实现表面估计的正则化。我们利用单辆车辆及包含大量车辆的大范围场景的实测与仿真数据,验证了该模型表征目标散射的能力。最后,我们展望了未来研究方向,呼吁发展能够学习复值神经表示的方法,以实现基于体素神经隐式表示的新数据集合成。