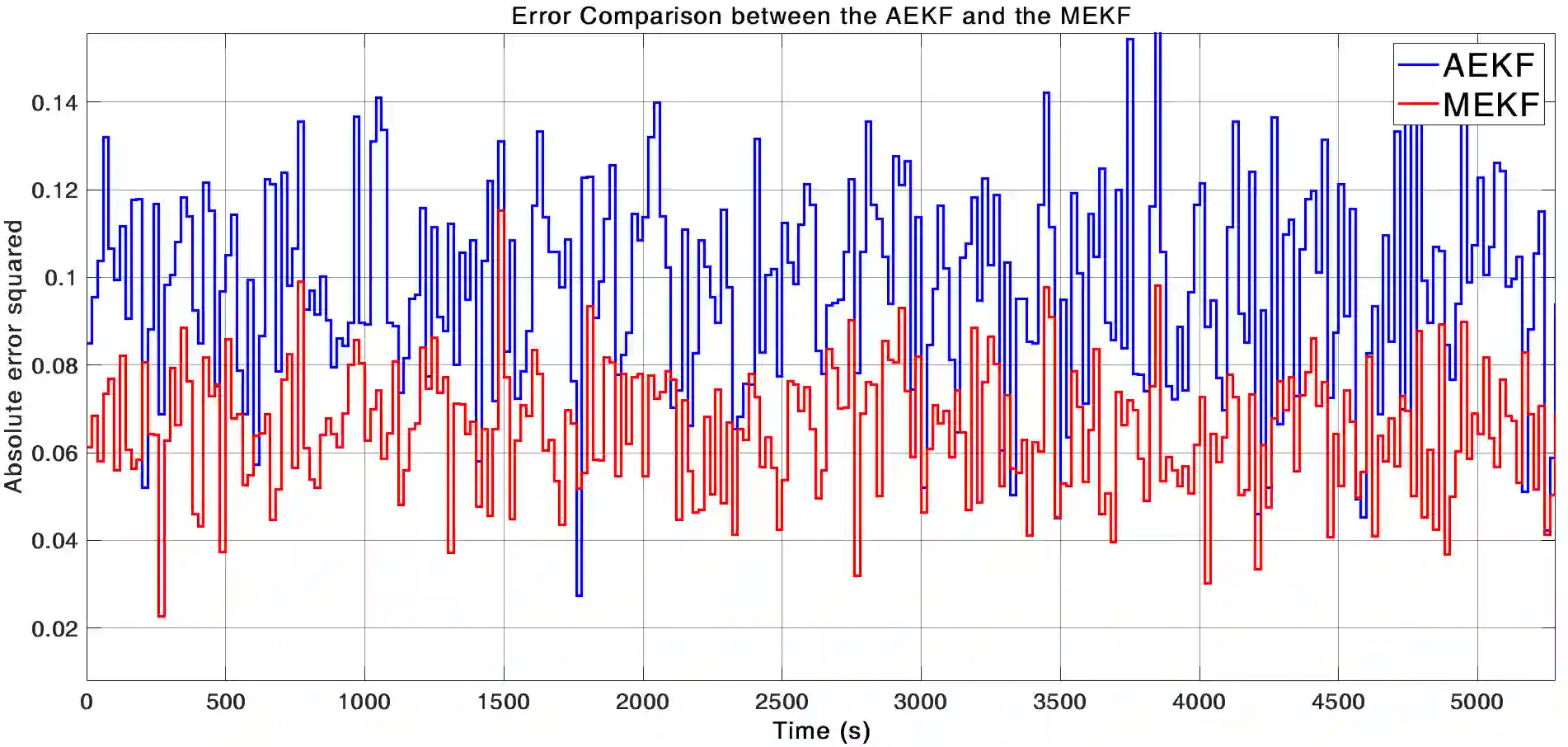
The general consensus is that the Multiplicative Extended Kalman Filter (MEKF) is superior to the Additive Extended Kalman Filter (AEKF) based on a wealth of theoretical evidence. This paper deals with a practical comparison between the two filters in simulation with the goal of verifying if the previous theoretical foundations are true. The AEKF and MEKF are two variants of the Extended Kalman Filter that differ in their approach to linearizing the system dynamics. The AEKF uses an additive correction term to update the state estimate, while the MEKF uses a multiplicative correction term. The two also differ in the state of which they use. The AEKF uses the quaternion as its state while the MEKF uses the Gibbs vector as its state. The results show that the MEKF consistently outperforms the AEKF in terms of estimation accuracy with lower uncertainty. The AEKF is more computationally efficient, but the difference is so low that it is almost negligible and it has no effect on a real-time application. Overall, the results suggest that the MEKF is a better choise for satellite attitude estimation due to its superior estimation accuracy and lower uncertainty, which agrees with the statements from previous work
翻译:普遍共识是,基于大量理论证据,乘性扩展卡尔曼滤波器优于加性扩展卡尔曼滤波器。本文通过仿真对两种滤波器进行实际比较,旨在验证先前的理论基础是否正确。AEKF和MEKF是扩展卡尔曼滤波器的两种变体,它们在系统动力学线性化方法上有所不同。AEKF使用加性修正项更新状态估计,而MEKF使用乘性修正项。两者使用的状态也不同:AEKF以四元数作为其状态,MEKF则以吉布斯向量作为其状态。结果表明,MEKF在估计精度方面始终优于AEKF,且不确定性更低。AEKF计算效率更高,但差异极小,几乎可以忽略,且对实时应用无影响。总体而言,研究结果表明,由于MEKF具有更优越的估计精度和更低的不确定性,它是卫星姿态估计的更优选择,这与先前研究的结论一致。