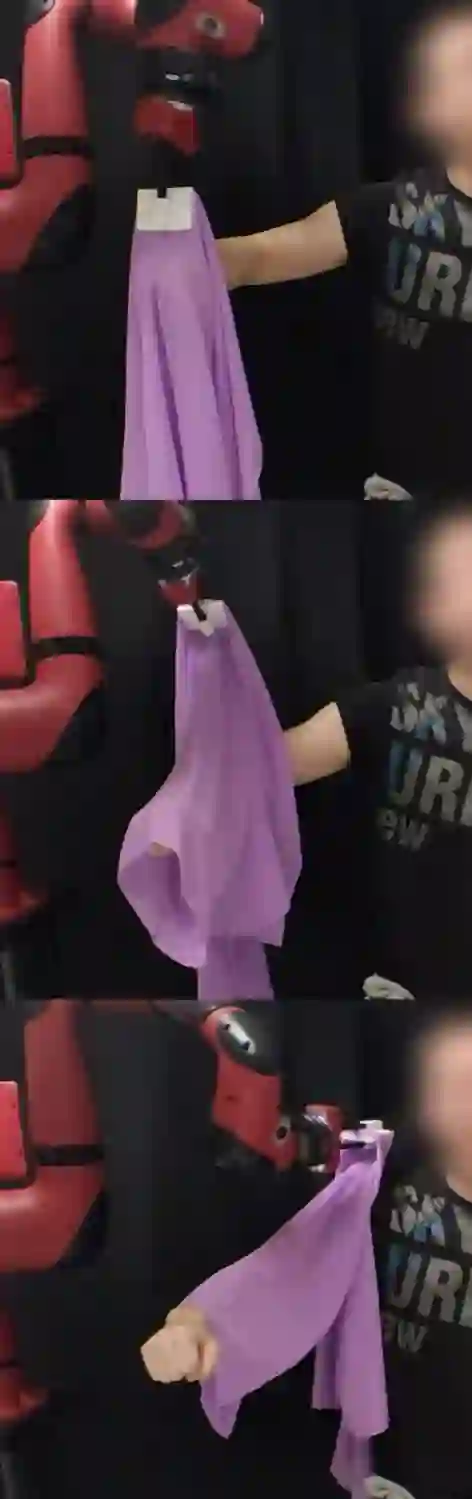
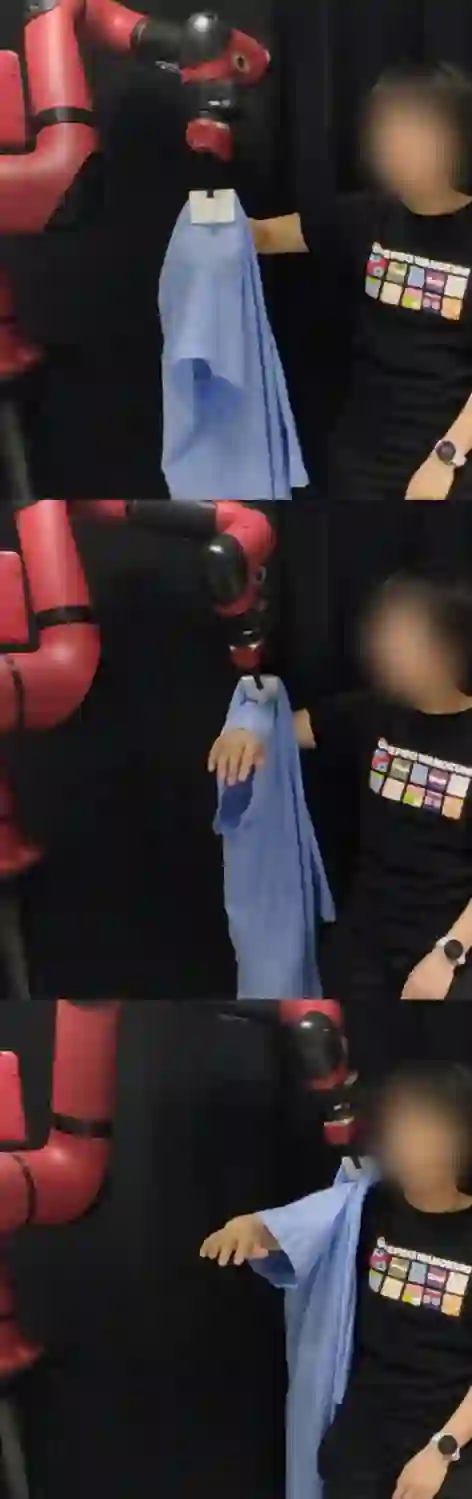
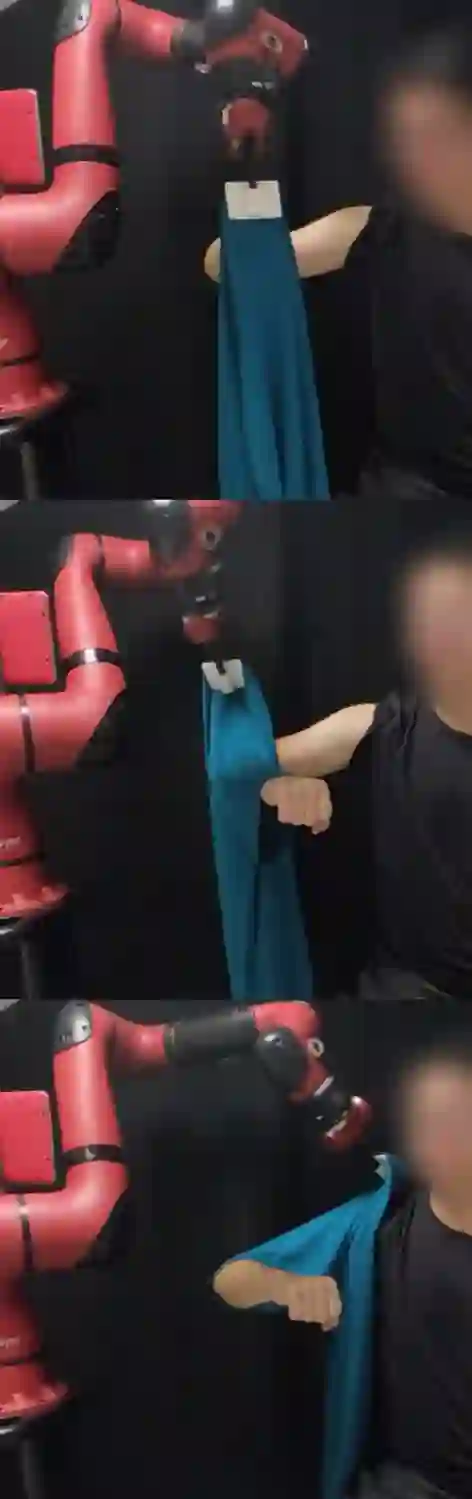
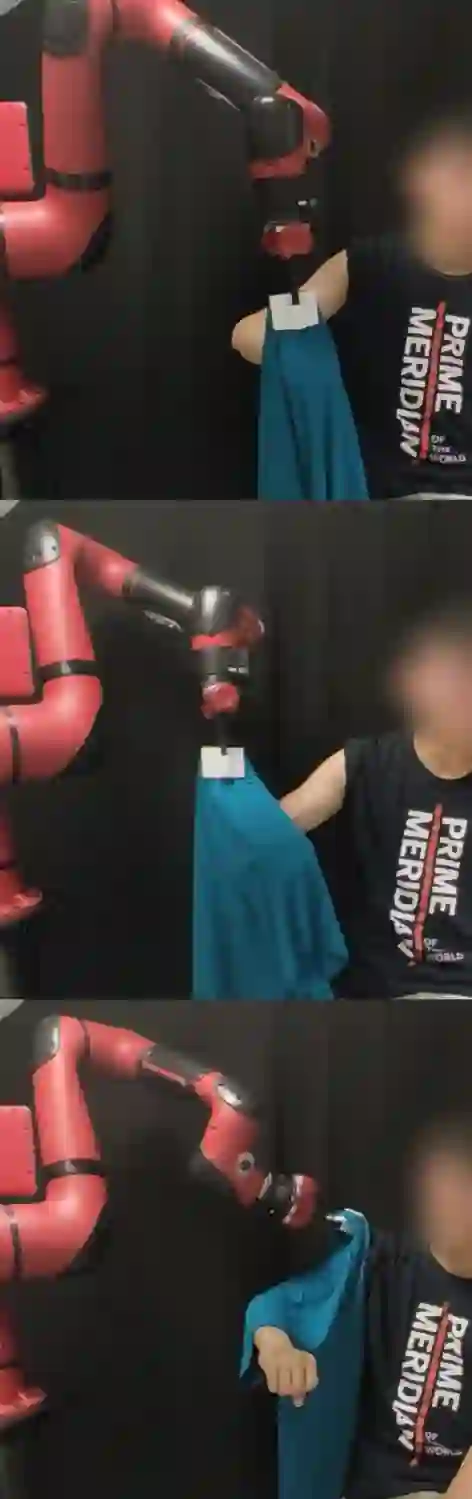
Robot-assisted dressing could benefit the lives of many people such as older adults and individuals with disabilities. Despite such potential, robot-assisted dressing remains a challenging task for robotics as it involves complex manipulation of deformable cloth in 3D space. Many prior works aim to solve the robot-assisted dressing task, but they make certain assumptions such as a fixed garment and a fixed arm pose that limit their ability to generalize. In this work, we develop a robot-assisted dressing system that is able to dress different garments on people with diverse poses from partial point cloud observations, based on a learned policy. We show that with proper design of the policy architecture and Q function, reinforcement learning (RL) can be used to learn effective policies with partial point cloud observations that work well for dressing diverse garments. We further leverage policy distillation to combine multiple policies trained on different ranges of human arm poses into a single policy that works over a wide range of different arm poses. We conduct comprehensive real-world evaluations of our system with 510 dressing trials in a human study with 17 participants with different arm poses and dressed garments. Our system is able to dress 86% of the length of the participants' arms on average. Videos can be found on our project webpage: https://sites.google.com/view/one-policy-dress.
翻译:机器人辅助穿衣有望改善老年人及残障人士的生活质量。尽管潜力巨大,但由于涉及三维空间中对可变形织物的复杂操控,这一任务对机器人技术仍极具挑战。现有诸多研究致力于解决机器人辅助穿衣问题,但多基于固定衣物与固定手臂姿态等假设,限制了其泛化能力。本研究开发了一套机器人辅助穿衣系统,基于学习到的策略,能够从局部点云观测中为不同姿态的人物穿脱多样衣物。研究表明,通过合理设计策略架构与Q函数,强化学习可利用局部点云观测有效学习适用于多种衣物穿着的策略。我们进一步采用策略蒸馏技术,将针对不同手臂姿态范围训练的多个策略融合为单一策略,使其在广泛的手臂姿态范围内均能有效工作。我们开展了包含510次穿衣试验的人体实验研究(17名不同手臂姿态与衣物的参与者),对系统进行综合真实环境评估。实验表明,该系统平均能完成参与者手臂长度86%的穿衣动作。相关视频见项目网页:https://sites.google.com/view/one-policy-dress。