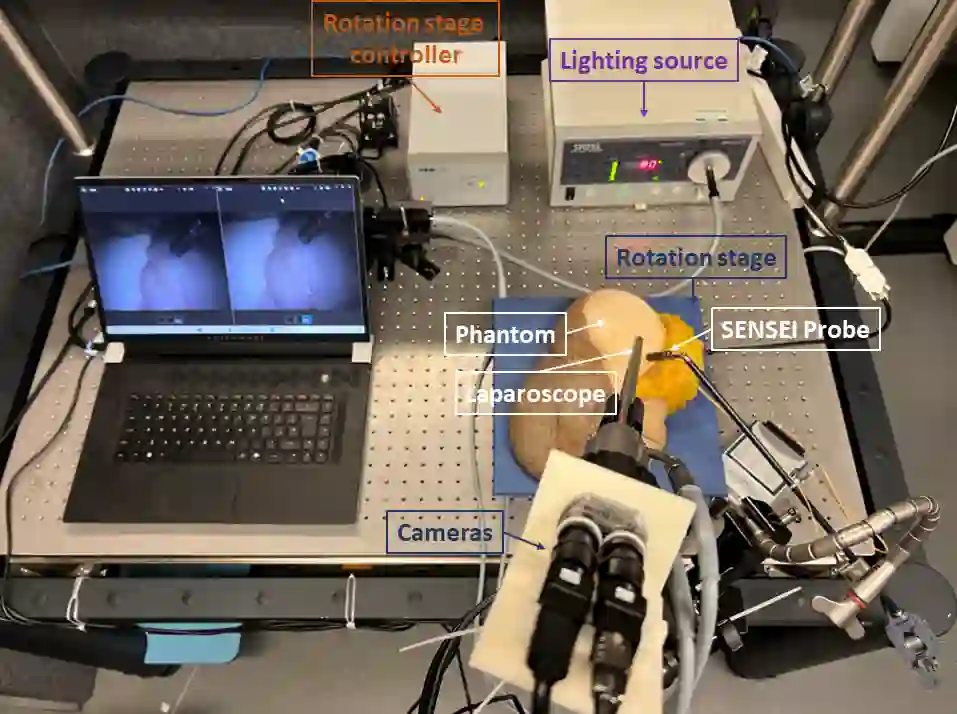
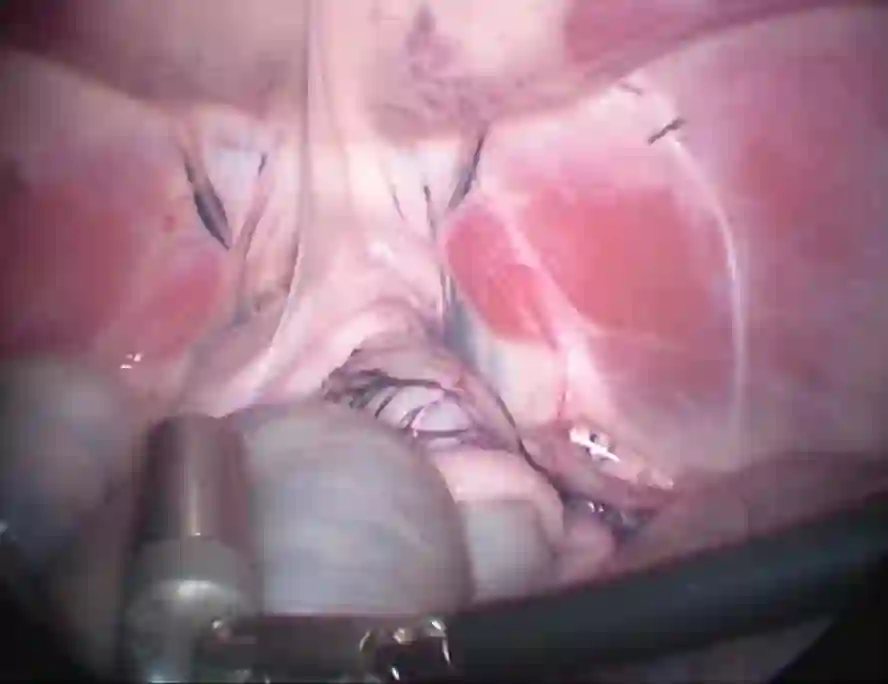
In surgical oncology, it is challenging for surgeons to identify lymph nodes and completely resect cancer even with pre-operative imaging systems like PET and CT, because of the lack of reliable intraoperative visualization tools. Endoscopic radio-guided cancer detection and resection has recently been evaluated whereby a novel tethered laparoscopic gamma detector is used to localize a preoperatively injected radiotracer. This can both enhance the endoscopic imaging and complement preoperative nuclear imaging data. However, gamma activity visualization is challenging to present to the operator because the probe is non-imaging and it does not visibly indicate the activity origination on the tissue surface. Initial failed attempts used segmentation or geometric methods, but led to the discovery that it could be resolved by leveraging high-dimensional image features and probe position information. To demonstrate the effectiveness of this solution, we designed and implemented a simple regression network that successfully addressed the problem. To further validate the proposed solution, we acquired and publicly released two datasets captured using a custom-designed, portable stereo laparoscope system. Through intensive experimentation, we demonstrated that our method can successfully and effectively detect the sensing area, establishing a new performance benchmark. Code and data are available at https://github.com/br0202/Sensing_area_detection.git
翻译:在肿瘤外科学中,由于缺乏可靠的术中可视化工具,即使使用PET和CT等术前成像系统,外科医生仍难以识别淋巴结并完全切除癌症。近期,内镜引导下的放射性癌症检测与切除术被评估,该方法采用一种新型系留式腹腔镜伽马探头,用于定位术前注射的放射性示踪剂。这既能增强内镜成像,又能补充术前核成像数据。然而,伽马活性可视化对操作者来说存在挑战,因为该探头为非成像设备,且无法在组织表面直观指示活性来源。初期失败的尝试采用了分割或几何方法,但随后发现通过利用高维图像特征与探头位置信息可以解决该问题。为验证该方案的有效性,我们设计并实现了一个简单的回归网络,成功解决了这一难题。为进一步验证所提方案,我们使用定制便携式立体腹腔镜系统采集并公开了两个数据集。通过大量实验,我们证明了该方法能够成功且有效地检测传感区域,并建立了新的性能基准。代码与数据可在https://github.com/br0202/Sensing_area_detection.git获取。