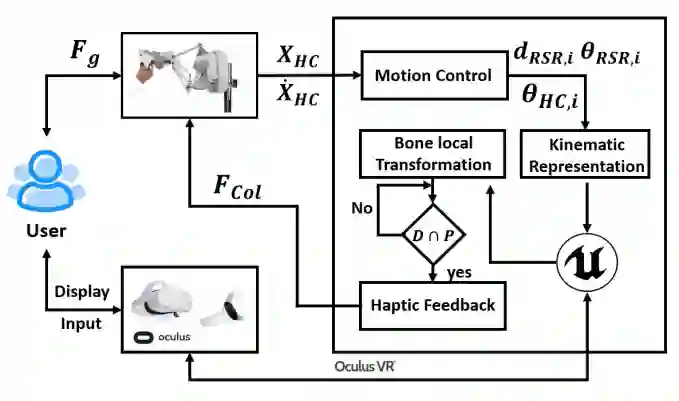
In this paper, we develop a virtual reality (VR) simulator for the Robossis robot-assisted femur fracture surgery. Due to the steep learning curve for such procedures, a VR simulator is essential for training surgeon(s) and staff. The Robossis Surgical Simulator (RSS) is designed to immerse user(s) in a realistic surgery setting using the Robossis system as completed in a previous real-world cadaveric procedure. The RSS is designed to interface the Sigma-7 Haptic Controller with the Robossis Surgical Robot (RSR) and the Meta Quest VR headset. Results show that the RSR follows user commands in 6 DOF and prevents the overlapping of bone segments. This development demonstrates a promising avenue for future implementation of the Robossis system.
翻译:本文开发了一款用于Robossis机器人辅助股骨骨折手术的虚拟现实模拟器。由于此类手术的学习曲线陡峭,虚拟现实模拟器对于培训外科医生及手术团队至关重要。Robossis手术模拟器旨在利用此前完成的实际尸体手术中使用的Robossis系统,将用户沉浸于逼真的手术环境中。该模拟器通过Sigma-7触觉控制器与Robossis手术机器人及Meta Quest虚拟现实头显实现交互。结果表明,RSR可跟随用户在六自由度上的指令,并防止骨段重叠。这一开发为未来Robossis系统的实际应用展示了极具前景的途径。