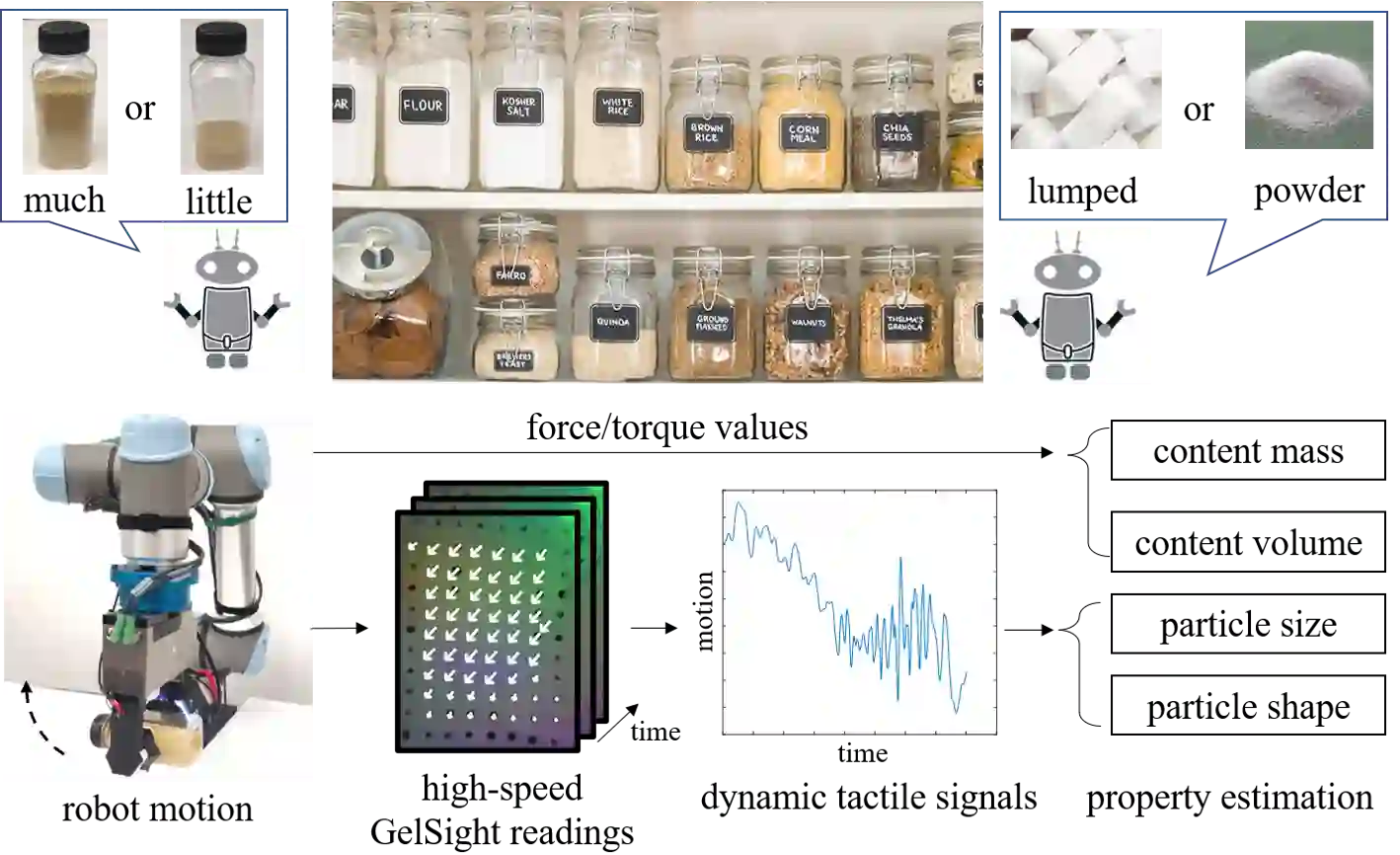
Solid particles, such as rice and coffee beans, are commonly stored in containers and are ubiquitous in our daily lives. Understanding those particles' properties could help us make later decisions or perform later manipulation tasks such as pouring. Humans typically interact with the containers to get an understanding of the particles inside them, but it is still a challenge for robots to achieve that. This work utilizes tactile sensing to estimate multiple properties of solid particles enclosed in the container, specifically, content mass, content volume, particle size, and particle shape. We design a sequence of robot actions to interact with the container. Based on physical understanding, we extract static force/torque value from the F/T sensor, vibration-related features and topple-related features from the newly designed high-speed GelSight tactile sensor to estimate those four particle properties. We test our method on $37$ very different daily particles, including powder, rice, beans, tablets, etc. Experiments show that our approach is able to estimate content mass with an error of $1.8$ g, content volume with an error of $6.1$ ml, particle size with an error of $1.1$ mm, and achieves an accuracy of $75.6$% for particle shape estimation. In addition, our method can generalize to unseen particles with unknown volumes. By estimating these particle properties, our method can help robots to better perceive the granular media and help with different manipulation tasks in daily life and industry.
翻译:固体颗粒,如大米和咖啡豆,常被储存于容器中,在我们的日常生活中无处不在。理解这些颗粒的性质有助于我们做出后续决策或执行倒出等操作任务。人类通常会通过接触容器来感知其中颗粒的性质,但对机器人而言,这仍是一个挑战。本研究利用触觉传感来估计容器内固体颗粒的多种性质,具体包括:内容物质量、内容物体积、颗粒尺寸和颗粒形状。我们设计了一系列机器人与容器的交互动作序列。基于物理理解,我们从力/力矩传感器中提取静态力/力矩值,并从新设计的高速GelSight触觉传感器中提取振动相关特征和倾倒相关特征,以估计上述四种颗粒性质。我们在37种差异巨大的日常颗粒上测试了该方法,包括粉末、大米、豆类、药片等。实验表明,我们的方法能够以1.8克的误差估计内容物质量,以6.1毫升的误差估计内容物体积,以1.1毫米的误差估计颗粒尺寸,并在颗粒形状估计上达到75.6%的准确率。此外,我们的方法可推广至未知体积的未见颗粒。通过估计这些颗粒性质,我们的方法能帮助机器人更好地感知颗粒介质,并辅助日常生活与工业中的多种操作任务。