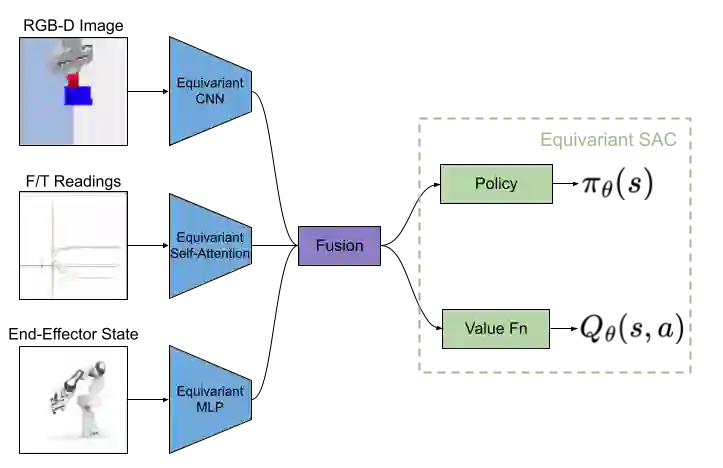
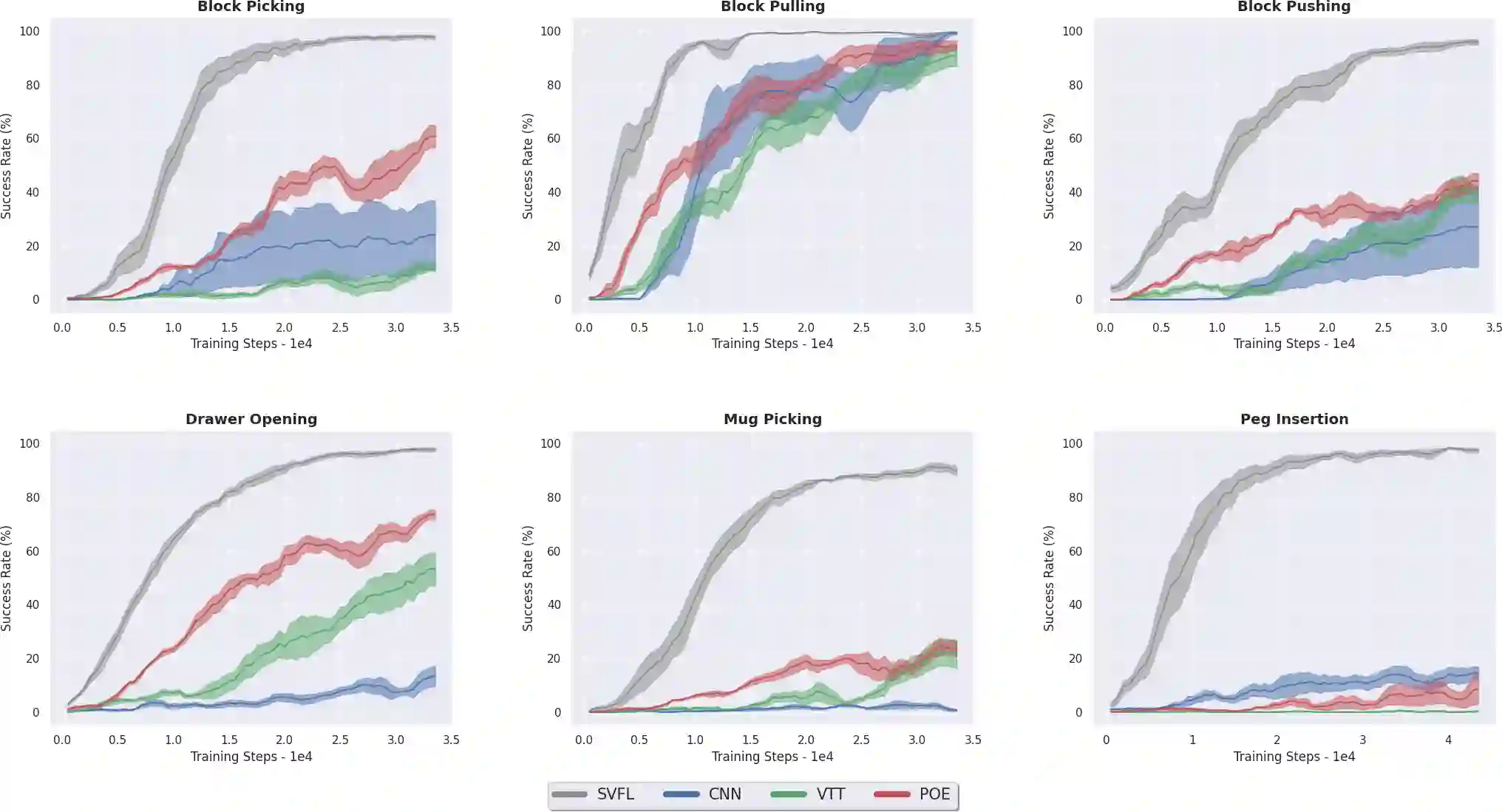
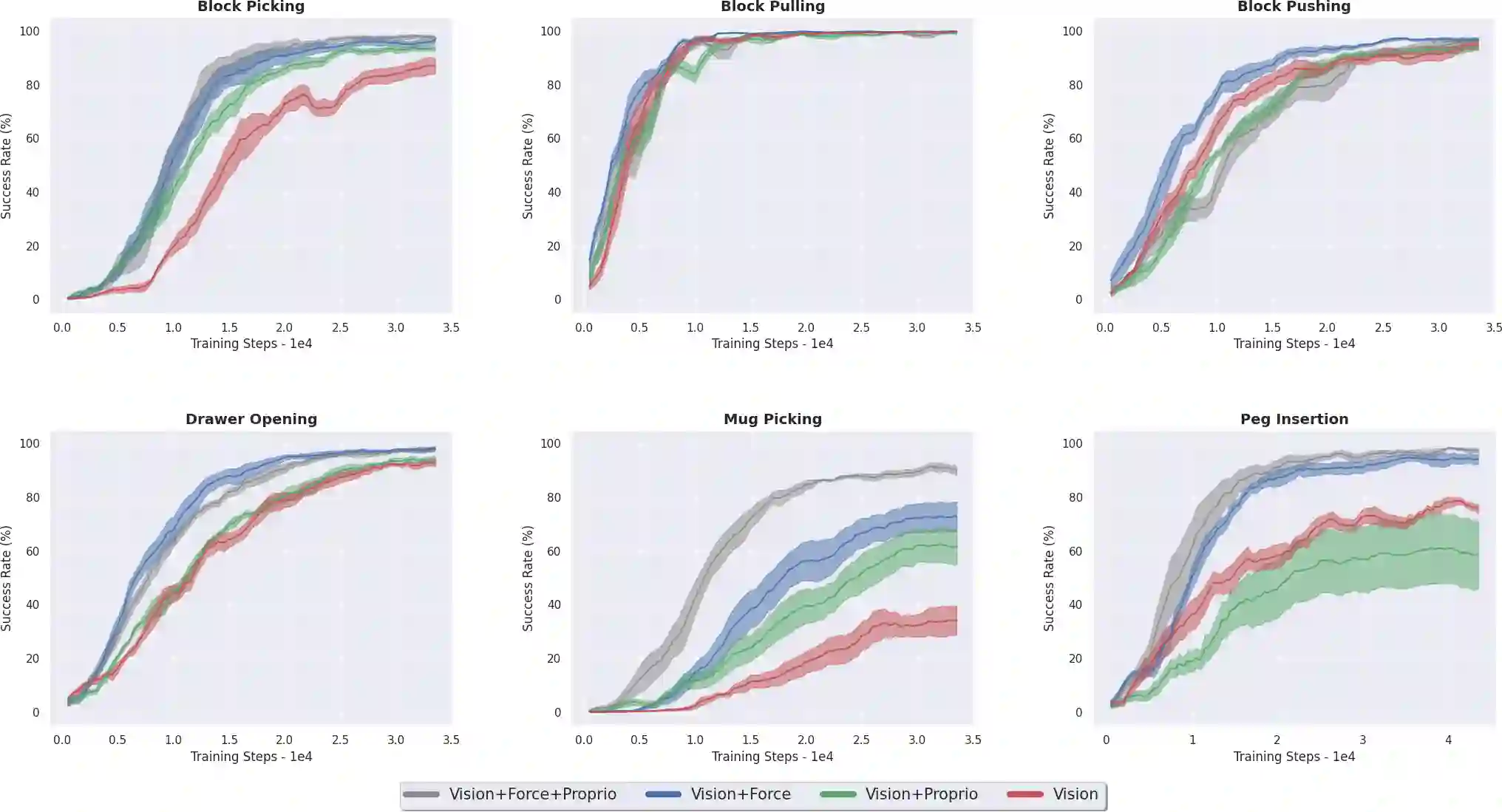
While it is generally acknowledged that force feedback is beneficial to robotic control, applications of policy learning to robotic manipulation typically only leverage visual feedback. Recently, symmetric neural models have been used to significantly improve the sample efficiency and performance of policy learning across a variety of robotic manipulation domains. This paper explores an application of symmetric policy learning to visual-force problems. We present Symmetric Visual Force Learning (SVFL), a novel method for robotic control which leverages visual and force feedback. We demonstrate that SVFL can significantly outperform state of the art baselines for visual force learning and report several interesting empirical findings related to the utility of learning force feedback control policies in both general manipulation tasks and scenarios with low visual acuity.
翻译:尽管力反馈通常被认为对机器人控制有益,但策略学习在机器人操作中的应用通常仅利用视觉反馈。近年来,对称神经模型已被用于显著提升多种机器人操作领域中策略学习的样本效率和性能。本文探讨了对称策略学习在视觉-力问题中的应用。我们提出了对称视觉力学习(SVFL),这是一种利用视觉和力反馈的新型机器人控制方法。实验表明,SVFL 在视觉力学习方面能显著超越现有最优基线方法,并报告了若干关于在通用操作任务及低视觉 acuity 场景中学习力反馈控制策略实用性的重要实证发现。