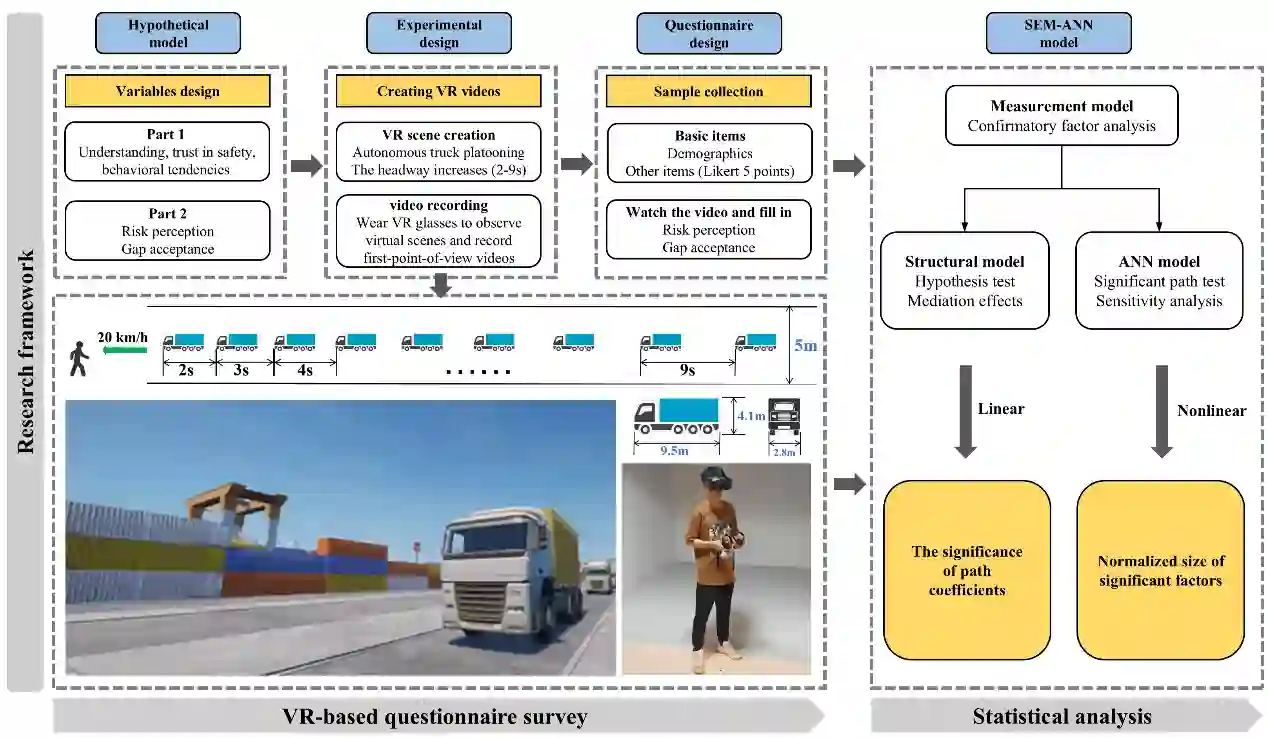
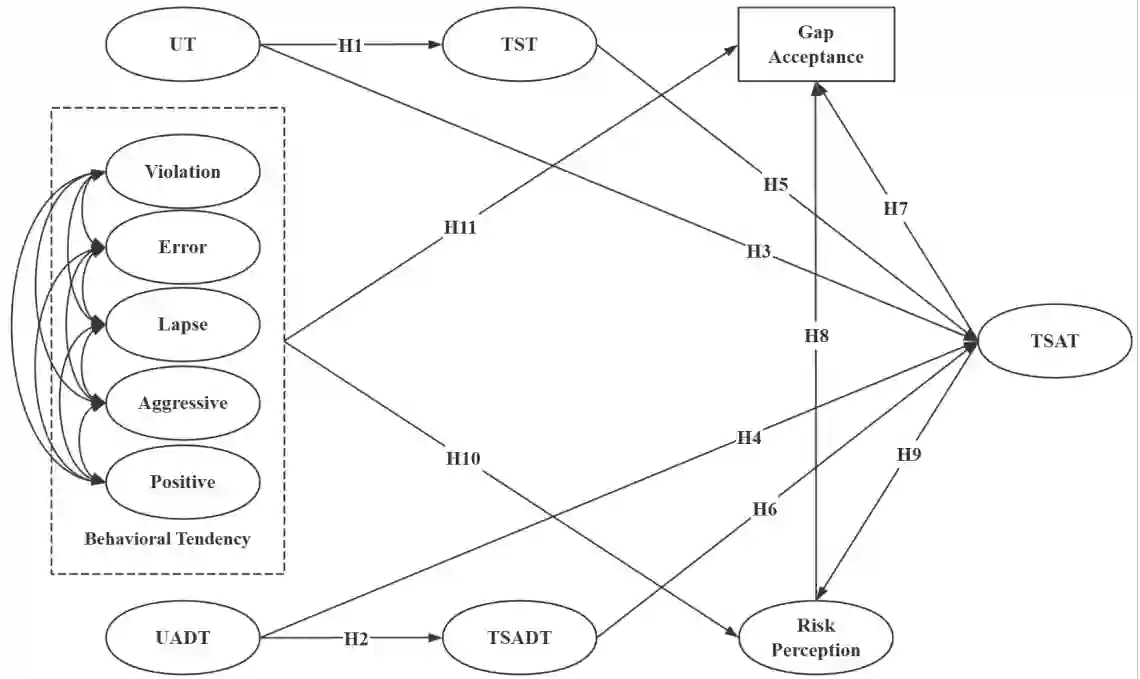
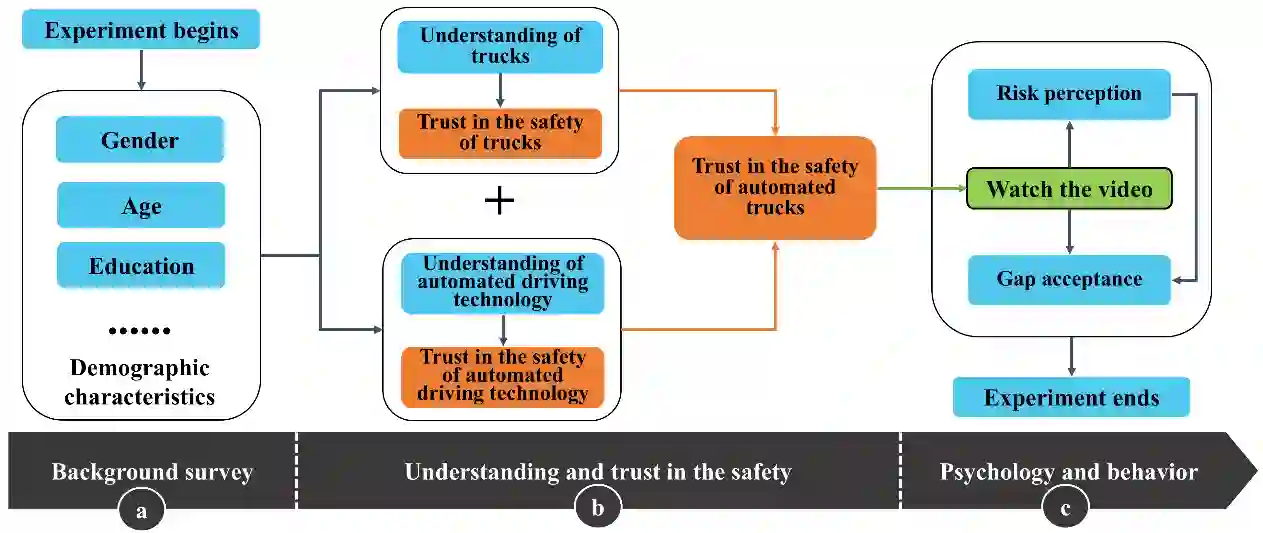
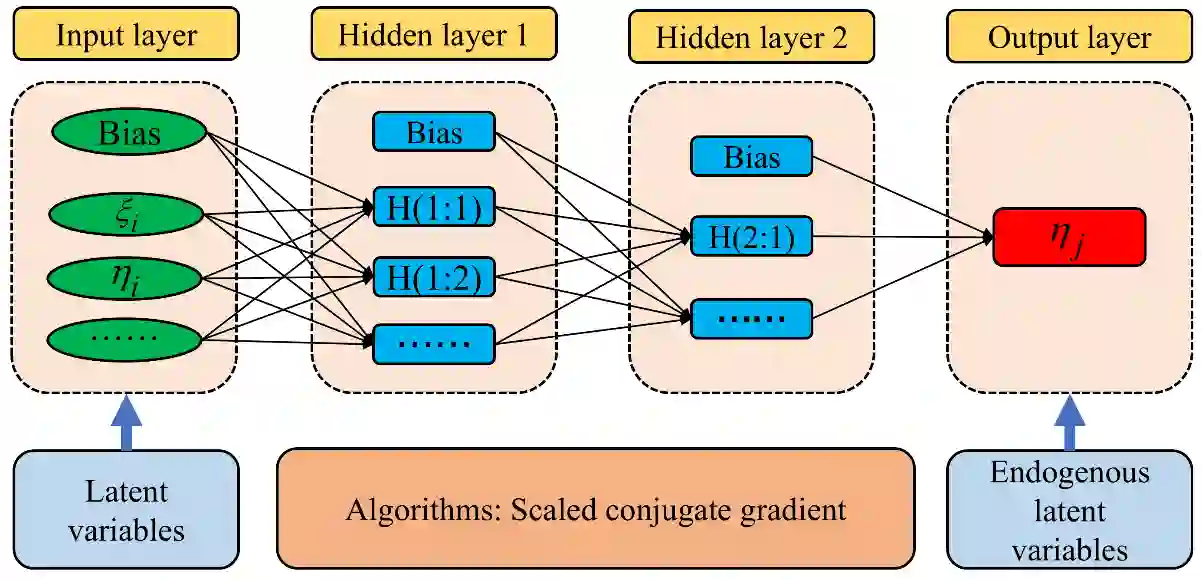
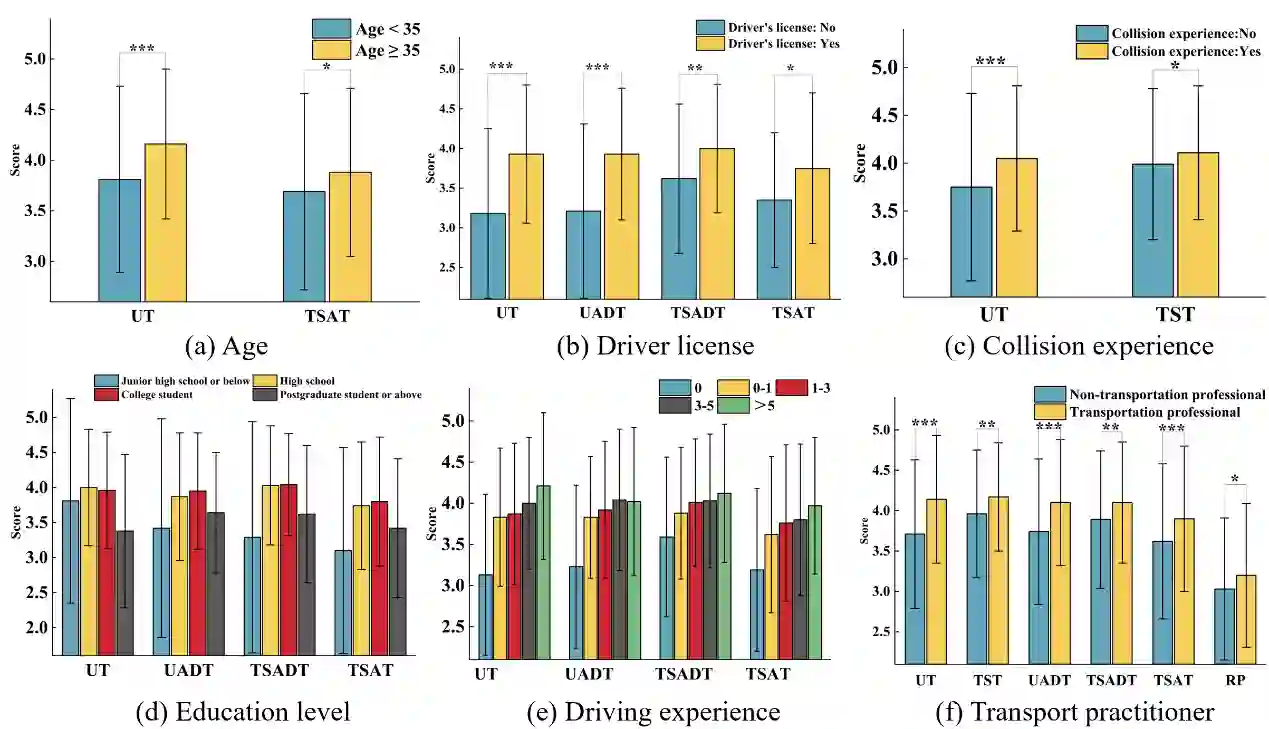
Although automated trucks have the potential to improve freight efficiency, reduce costs, and address driver shortages, organizing two or more trucks in a convoy has raised considerable concerns for pedestrian safety. This study conducted a controlled experiment to examine the influence of behavioral tendency, trust, and risk perception on pedestrian intention to cross in front of an automated truck platoon. A total of 603 subjects participated in the virtual reality video-based questionnaire survey. By fusing the merits of structural equation modeling and artificial neural networks, a two-stage, hybrid model was developed to examine complex relationships between latent variables and gap-acceptance behaviors. Our results indicated that subjects watched an average of five vehicle gaps before starting crossing and the average time gap accepted was about 5.35 seconds. Risk perception not only played the most dominant role in shaping pedestrian crossing decisions, but also served as the strong bone, mediating the effects of behavioral tendency and trust on gap-acceptance. Participants who frequently violated traffic rules were more likely to accept a smaller time gap, while those who showed positive behaviors to other road users tended to wait for a larger time gap. Participants who often committed errors, showed aggressive behaviors, and held greater trust in the safety of automated trucks generally reported a lower level of risk for road-crossing in front of automated truck platoons. Built on these findings, a range of tailored countermeasures were proposed to ensure safer and smother interactions between pedestrians and automated truck platoons.
翻译:尽管自动驾驶卡车具有提升货运效率、降低成本及缓解驾驶员短缺的潜力,但将两辆及以上卡车组成队列行驶引发了公众对行人安全的重大关切。本研究通过受控实验,探究行为倾向、信任及风险感知对行人在自动驾驶卡车编队前穿越意向的影响。共计603名受试者参与了基于虚拟现实视频的问卷调查。通过融合结构方程模型与人工神经网络的优势,本研究构建了一个两阶段混合模型,用以检验潜变量与间隙接受行为之间的复杂关系。结果表明:受试者在开始穿越前平均观察了五个车辆间隙,接受的平均时间间隙约为5.35秒。风险感知不仅在行人穿越决策中起主导作用,还作为关键中介变量,调节行为倾向与信任对间隙接受的影响。经常违反交通规则的参与者更倾向于接受较小的时间间隙,而对其他道路使用者表现出积极行为的参与者则倾向于等待更大的时间间隙。常出现操作失误、表现出攻击性行为,以及对自动驾驶卡车安全性持有更高信任度的参与者,通常对在自动驾驶卡车编队前过马路的风险感知水平较低。基于上述发现,本研究提出了一系列针对性措施,以保障行人与自动驾驶卡车编队之间更安全、顺畅的交互。