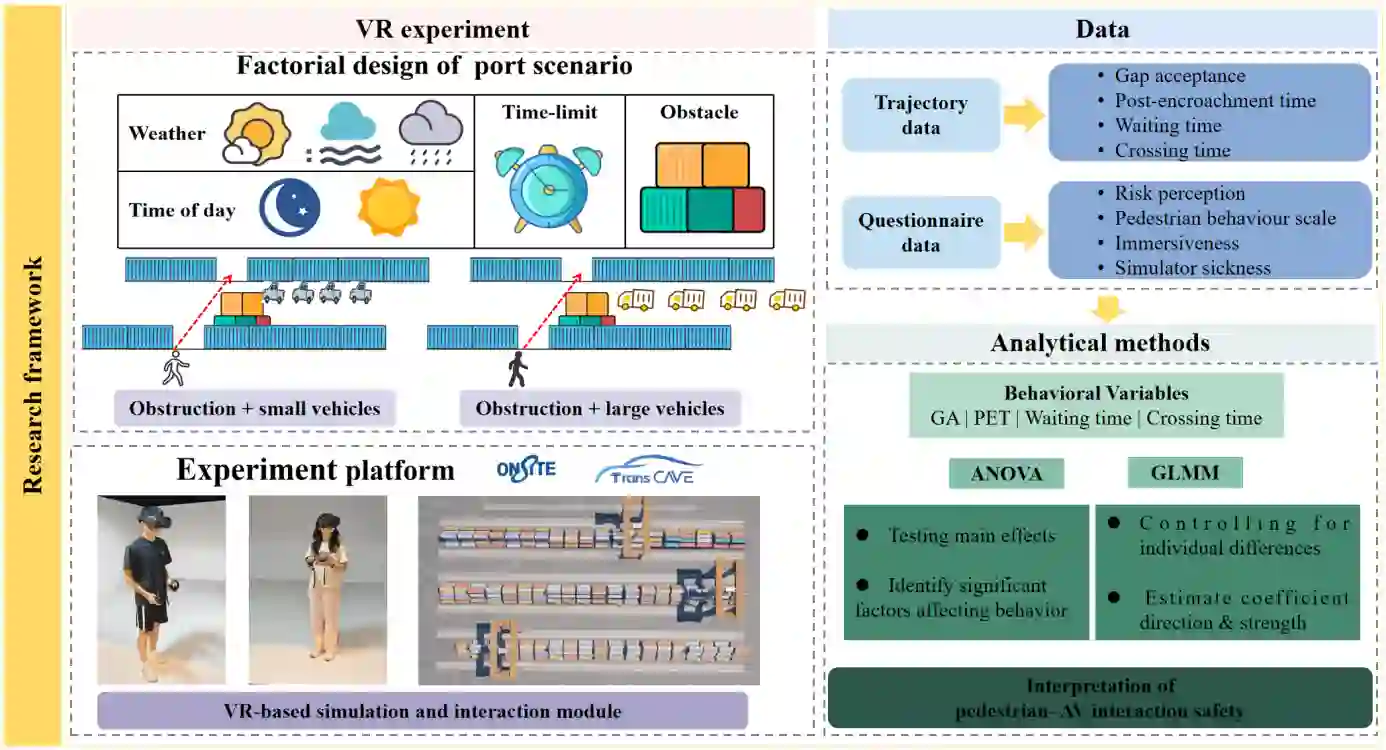
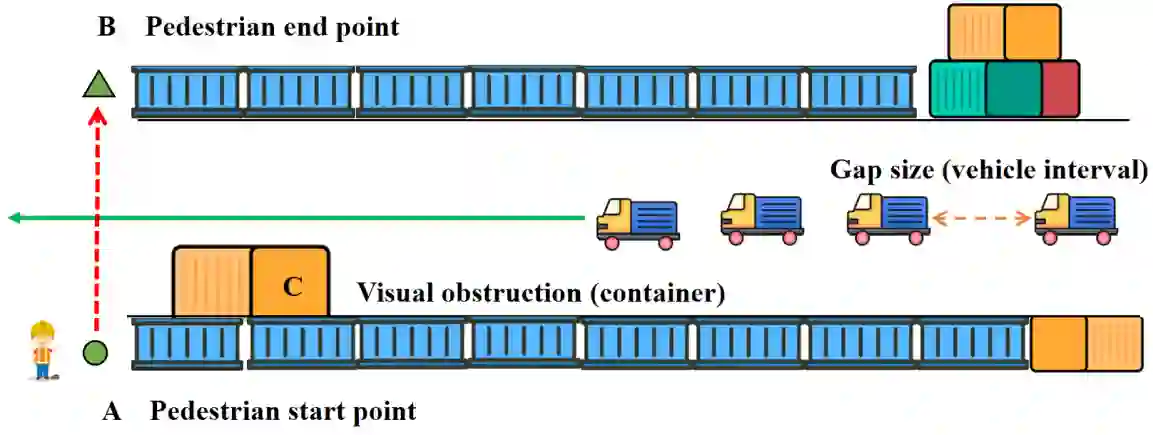
Autonomous driving improves traffic efficiency but presents safety challenges in complex port environments. This study investigates how environmental factors, traffic factors, and pedestrian characteristics influence interaction safety between autonomous vehicles and pedestrians in ports. Using virtual reality (VR) simulations of typical port scenarios, 33 participants completed pedestrian crossing tasks under varying visibility, vehicle sizes, and time pressure conditions. Results indicate that low-visibility conditions, partial occlusions and larger vehicle sizes significantly increase perceived risk, prompting pedestrians to wait longer and accept larger gaps. Specifically, pedestrians tended to accept larger gaps and waited longer when interacting with large autonomous truck platoons, reflecting heightened caution due to their perceived threat. However, local obstructions also reduce post-encroachment time, compressing safety margins. Individual attributes such as age, gender, and driving experience further shape decision-making, while time pressure undermines compensatory behaviors and increases risk. Based on these findings, safety strategies are proposed, including installing wide-angle cameras at multiple viewpoints, enabling real-time vehicle-infrastructure communication, enhancing port lighting and signage, and strengthening pedestrian safety training. This study offers practical recommendations for improving the safety and deployment of vision-based autonomous systems in port settings.
翻译:自动驾驶技术提升了交通效率,但在复杂的港口环境中带来了安全挑战。本研究探讨了环境因素、交通因素及行人特征如何影响港口内自动驾驶车辆与行人之间的交互安全性。通过虚拟现实(VR)模拟典型港口场景,33名参与者在不同能见度、车辆尺寸及时间压力条件下完成了行人横穿任务。结果表明,低能见度条件、部分遮挡及较大的车辆尺寸显著增加了感知风险,促使行人等待更长时间并接受更大的车距。具体而言,行人在与大型自动驾驶卡车队列交互时倾向于接受更大的车距并等待更久,这反映了因其感知到的威胁而增强的谨慎性。然而,局部障碍物也会缩短侵入后时间,从而压缩安全裕度。年龄、性别和驾驶经验等个体属性进一步影响了决策过程,而时间压力则会削弱补偿行为并增加风险。基于这些发现,本研究提出了安全策略,包括在多视角安装广角摄像头、实现车辆与基础设施的实时通信、改善港口照明与标识系统,以及加强行人安全培训。本研究为提升港口环境中基于视觉的自动驾驶系统的安全性与部署提供了实用建议。