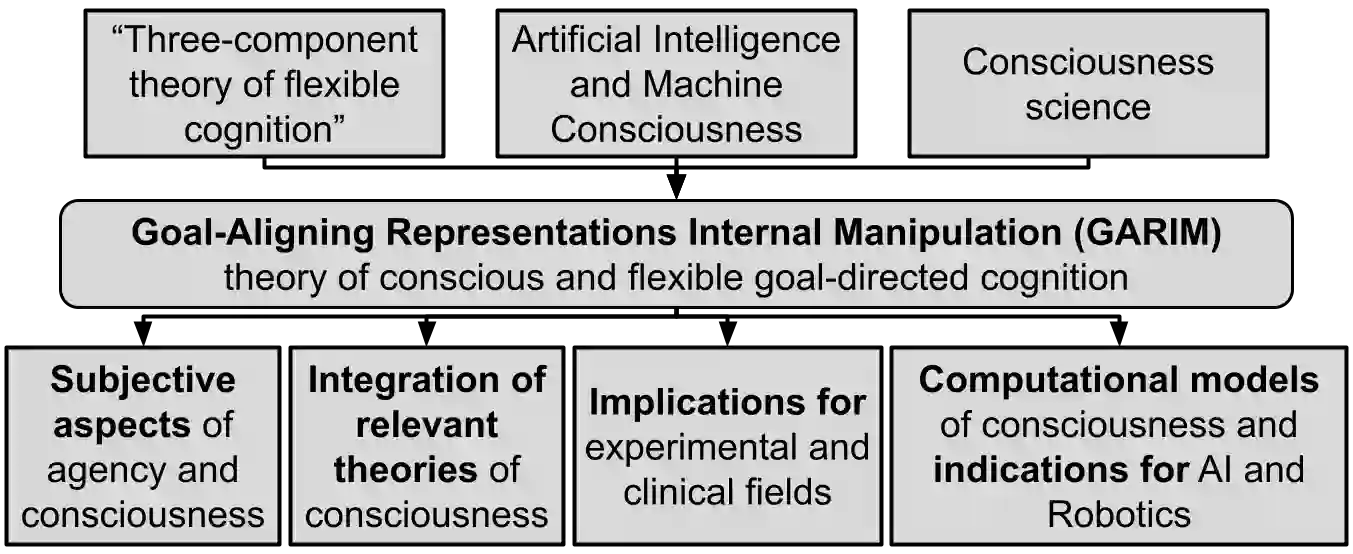
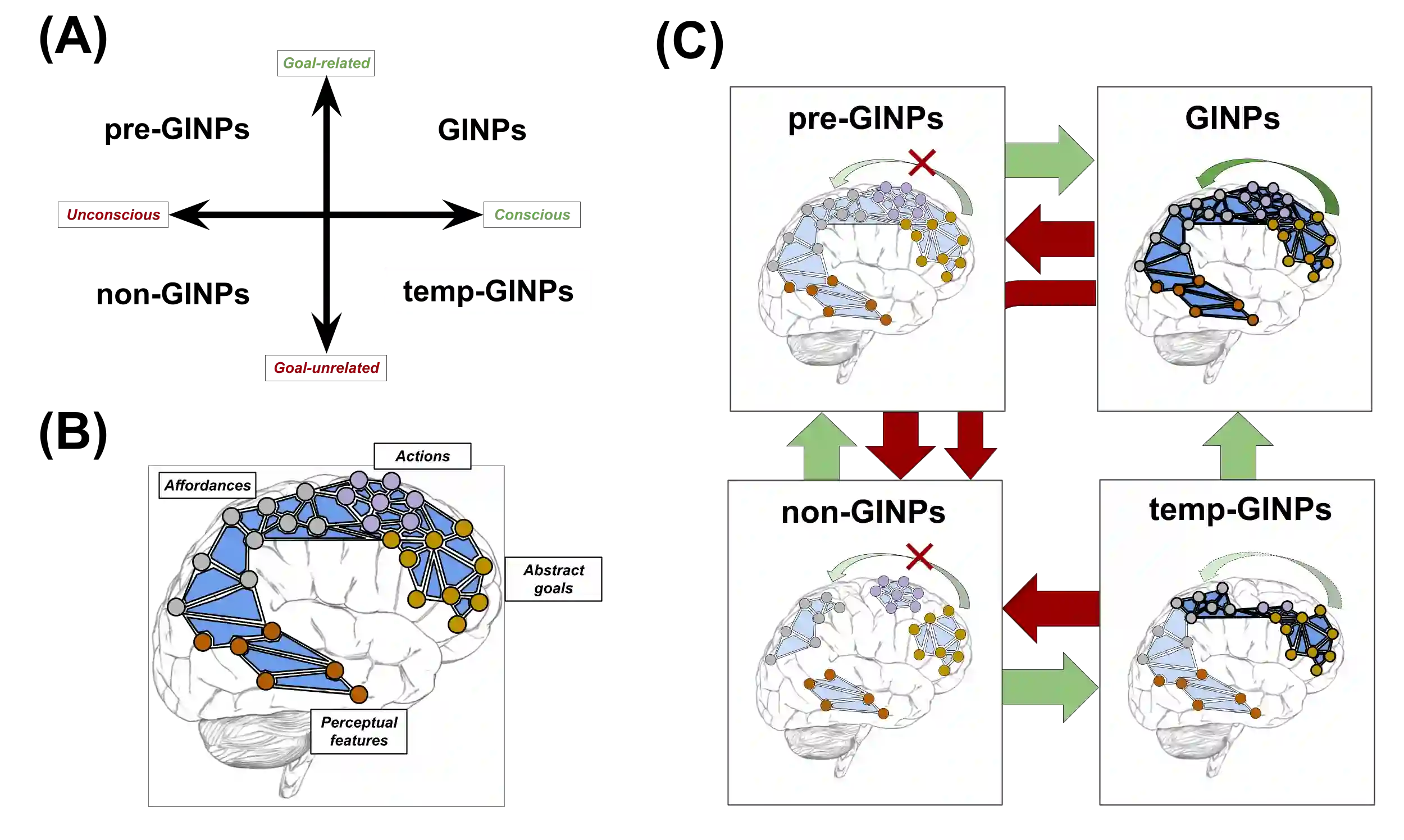
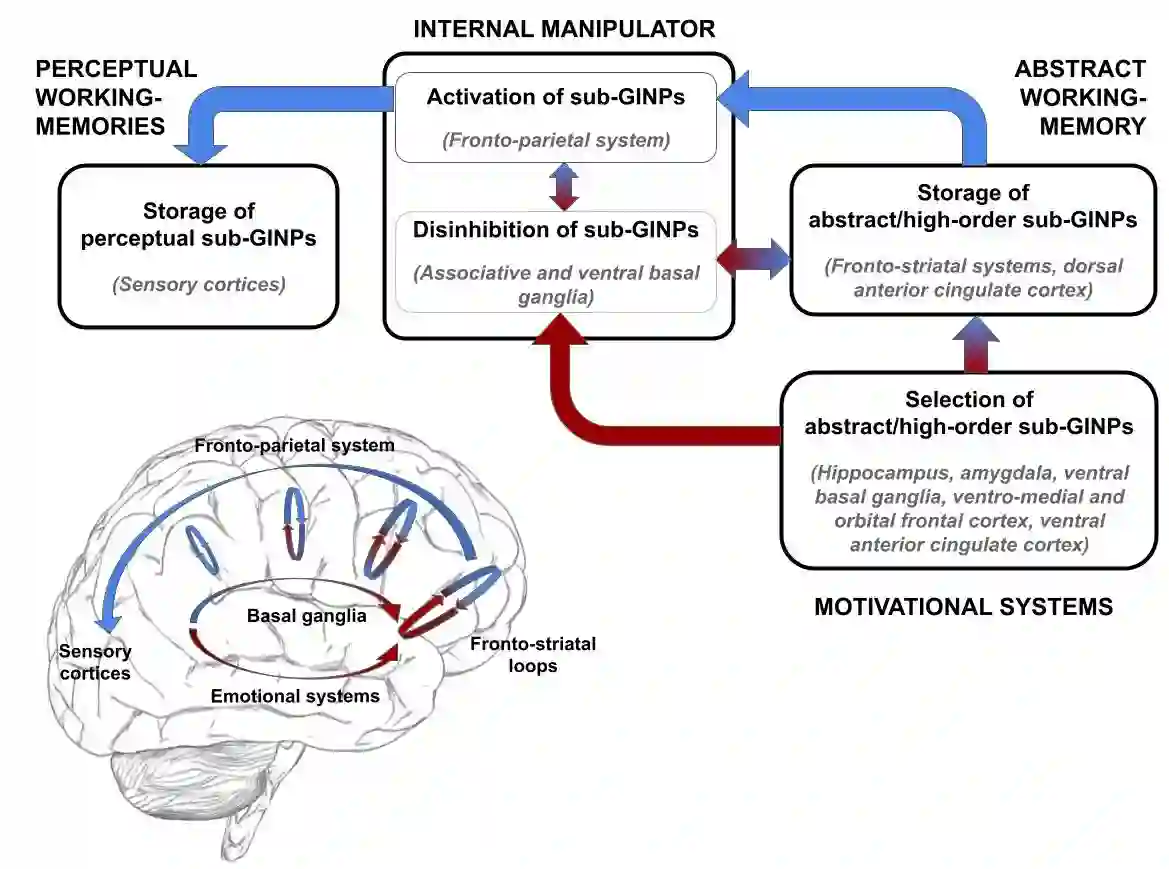
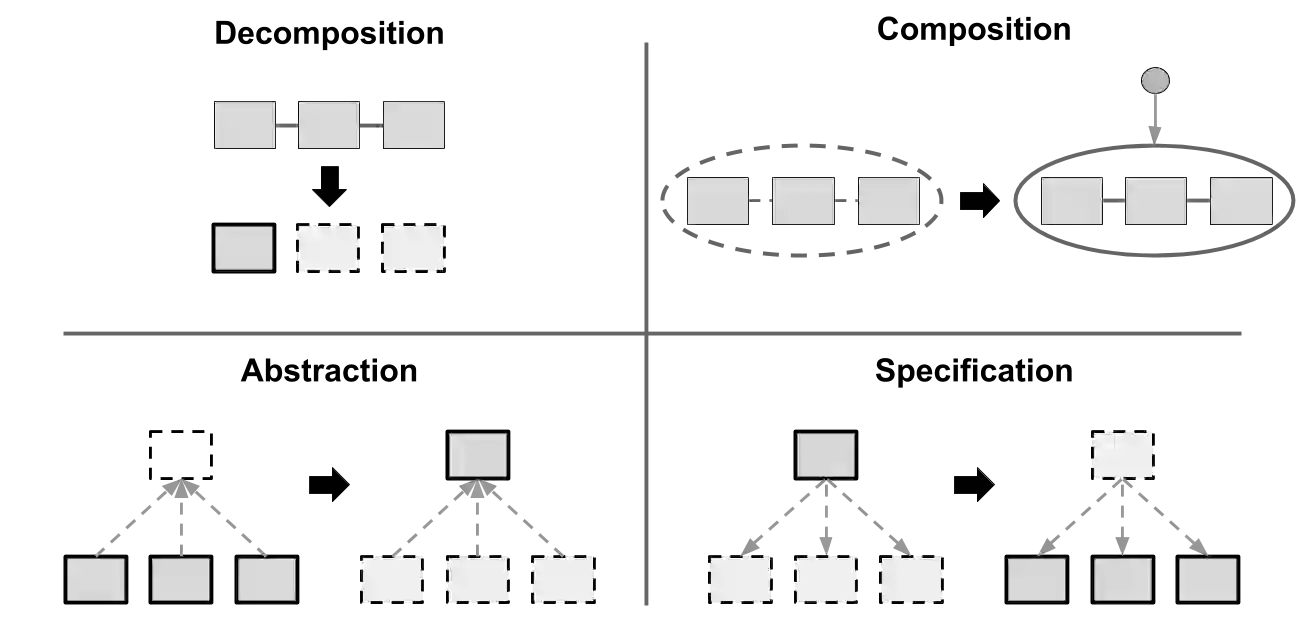
Goal-directed manipulation of representations is a key element of human flexible behaviour, while consciousness is often related to several aspects of higher-order cognition and human flexibility. Currently these two phenomena are only partially integrated (e.g., see Neurorepresentationalism) and this (a) limits our understanding of neuro-computational processes that lead conscious states to produce flexible goal-directed behaviours, (b) prevents a computational formalisation of conscious goal-directed manipulations of representations occurring in the brain, and (c) inhibits the exploitation of this knowledge for modelling and technological purposes. Addressing these issues, here we extend our `three-component theory of flexible cognition' by proposing the `Goal-Aligning Representations Internal Manipulation' (GARIM) theory of conscious and flexible goal-directed cognition. The central idea of the theory is that conscious states support the active manipulation of goal-relevant internal representations (e.g., of world states, objects, and action sequences) to make them more aligned with the pursued goals. This leads to the generation of the knowledge which is necessary to face novel situations/goals, thus increasing the flexibility of goal-directed behaviours. The GARIM theory integrates key aspects of the main theories of consciousness into the functional neuro-computational framework of goal-directed behaviour. Moreover, it takes into account the subjective sensation of agency that accompanies conscious goal-directed processes (`GARIM agency'). The proposal has also implications for experimental studies on consciousness and clinical aspects of conscious goal-directed behaviour. Finally, the GARIM theory benefit technological fields such as autonomous robotics and machine learning (e.g., the manipulation process may describe the operations performed by systems based on transformers).
翻译:表徵的目標導向操控是人類靈活行為的關鍵要素,而意識常與高階認知及人類靈活性的諸多面向相關。目前這兩種現象僅被部分整合(例如,參見神經表徵主義),這(a)限制了我們對神經計算過程的理解,即如何使意識狀態產生靈活的目標導向行為;(b)妨礙了對大腦中發生的意識性目標導向表徵操控進行計算形式化;以及(c)抑制了將此知識應用於建模與技術領域的開發。為解決這些問題,我們在此擴展了「靈活認知的三組件理論」,提出「目標對齊表徵內部操控」(GARIM)理論,以解釋意識性與靈活的目標導向認知。該理論的核心觀點在於:意識狀態支持對目標相關內部表徵(例如世界狀態、物體與動作序列的表徵)進行積極操控,使其更貼合所追求的目標。這促使生成應對新穎情境或目標所需的知識,從而增強目標導向行為的靈活性。GARIM理論將意識主要理論的關鍵面向整合至目標導向行為的功能性神經計算框架中,並考慮了伴隨意識性目標導向過程的主體能動感(「GARIM能動性」)。此理論亦對意識的實驗研究及意識性目標導向行為的臨床問題具有啟示。最後,GARIM理論惠及自主機器人技術與機器學習等科技領域(例如,操控過程可能描述基於Transformer的系統所執行的運算)。