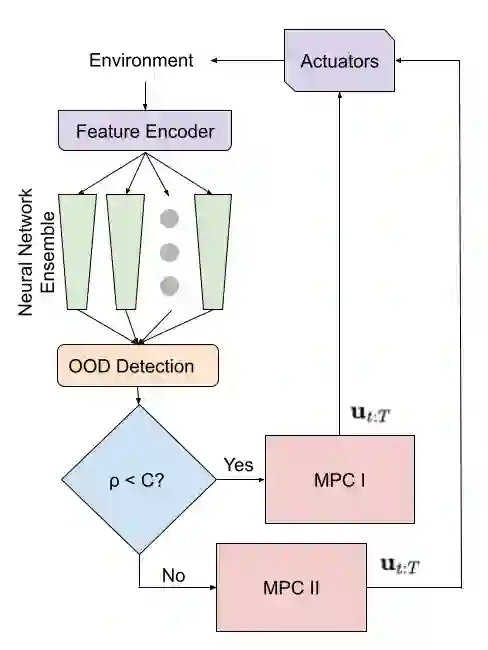
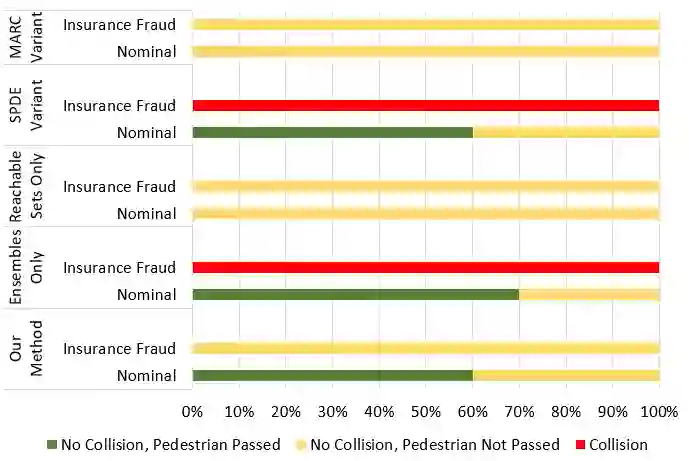
We present SODA-MPC, a Safe, Out-of-Distribution-Adaptive Model Predictive Control algorithm, which uses an ensemble of learned models for prediction, with a runtime monitor to flag unreliable out-of-distribution (OOD) predictions. When an OOD situation is detected, SODA-MPC triggers a safe fallback control strategy based on reachability, yielding a control framework that achieves the high performance of learning-based models while preserving the safety of reachability-based control. We demonstrate the method in the context of an autonomous vehicle, driving among dynamic pedestrians, where SODA-MPC uses a neural network ensemble for pedestrian prediction. We calibrate the OOD signal using conformal prediction to derive an OOD detector with probabilistic guarantees on the false-positive rate, given a user-specified confidence level. During in-distribution operation, the MPC controller avoids collisions with a pedestrian based on the trajectory predicted by the mean of the ensemble. When OOD conditions are detected, the MPC switches to a reachability-based controller to avoid collisions with the reachable set of the pedestrian assuming a maximum pedestrian speed, to guarantee safety under the worst-case actions of the pedestrian. We verify SODA-MPC in extensive autonomous driving simulations in a pedestrian-crossing scenario. Our model ensemble is trained and calibrated with real pedestrian data, showing that our OOD detector obtains the desired accuracy rate within a theoretically-predicted range. We empirically show improved safety and improved task completion compared with two state-of-the-art MPC methods that also use conformal prediction, but without OOD adaptation. Further, we demonstrate the effectiveness of our method with the large-scale multi-agent predictor Trajectron++, using large-scale traffic data from the nuScenes dataset for training and calibration.
翻译:我们提出SODA-MPC,一种安全、分布外自适应的模型预测控制算法,该算法使用一组学习模型进行预测,并通过运行时监测器标记不可靠的分布外预测。当检测到分布外情况时,SODA-MPC触发基于可达集的安全回退控制策略,从而形成一个控制框架,既能实现基于学习模型的高性能,又能保持基于可达集控制的安全性。我们在动态行人环境中的自动驾驶场景下验证该方法,其中SODA-MPC使用神经网络集成模型进行行人轨迹预测。我们采用保形预测方法校准分布外信号,从而在用户指定置信水平下,构建具有误报率概率保证的分布外检测器。在分布内运行时,模型预测控制器基于集成模型的平均预测轨迹避免与行人碰撞。当检测到分布外条件时,模型预测控制器切换至基于可达集的控制器,假设行人最大速度下避免与行人可达集碰撞,以保证行人在最坏情况动作下的安全性。我们在行人横穿场景的广泛自动驾驶仿真中验证SODA-MPC。我们的模型集成使用真实行人数据进行训练和校准,结果表明我们的分布外检测器在理论预测范围内达到了期望的准确率。与两种同样使用保形预测但未进行分布外自适应调整的先进模型预测控制方法相比,我们通过实验证明了本方法在安全性和任务完成率方面的提升。此外,我们使用大规模多智能体预测器Trajectron++,并采用nuScenes数据集中的大规模交通数据进行训练和校准,进一步验证了本方法的有效性。