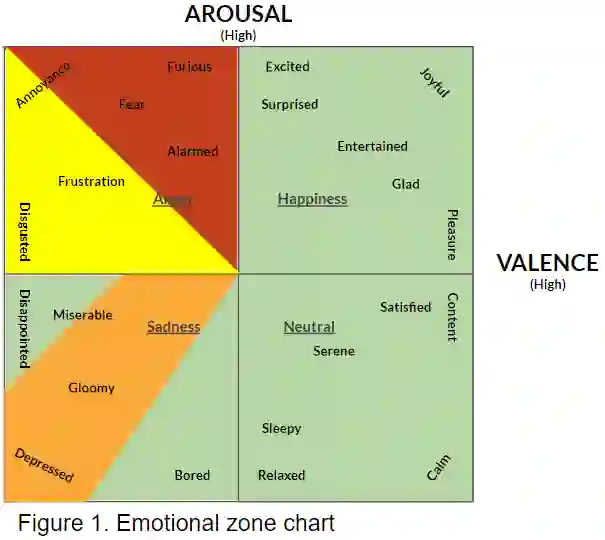
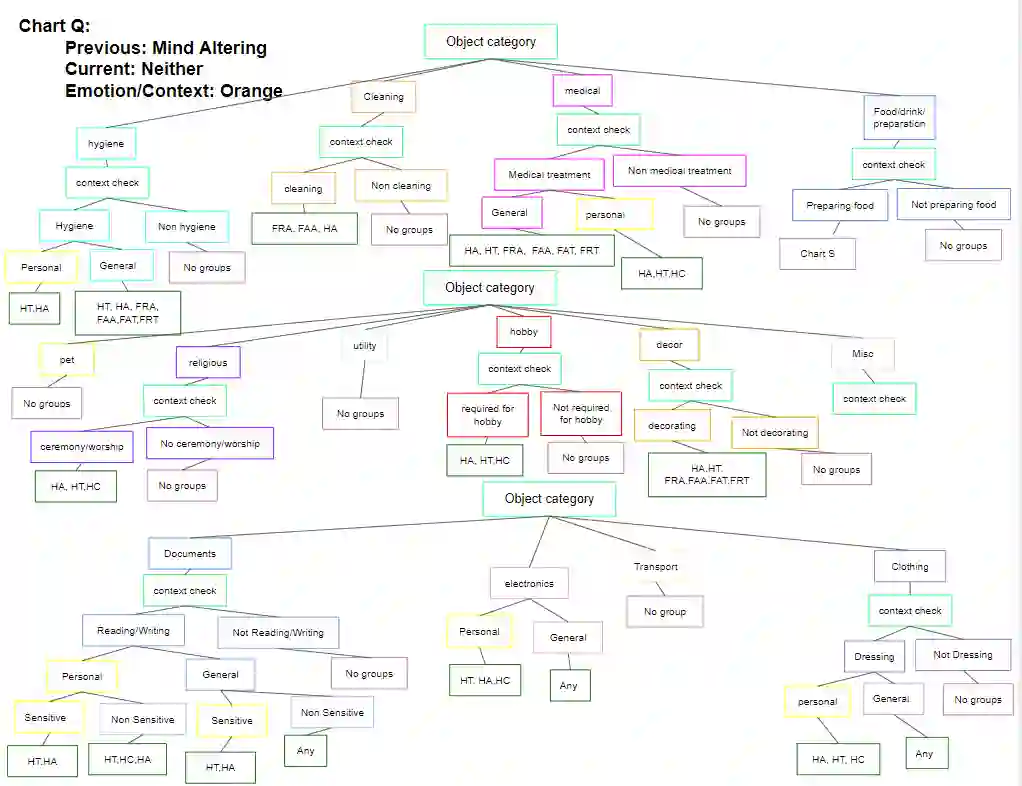
Emotions guide our decision making process and yet have been little explored in practical ethical decision making scenarios. In this challenge, we explore emotions and how they can influence ethical decision making in a home robot context: which fetch requests should a robot execute, and why or why not? We discuss, in particular, two aspects of emotion: (1) somatic markers: objects to be retrieved are tagged as negative (dangerous, e.g. knives or mind-altering, e.g. medicine with overdose potential), providing a quick heuristic for where to focus attention to avoid the classic Frame Problem of artificial intelligence, (2) emotion inference: users' valence and arousal levels are taken into account in defining how and when a robot should respond to a human's requests, e.g. to carefully consider giving dangerous items to users experiencing intense emotions. Our emotion-based approach builds a foundation for the primary consideration of Safety, and is complemented by policies that support overriding based on Context (e.g. age of user, allergies) and Privacy (e.g. administrator settings). Transparency is another key aspect of our solution. Our solution is defined using behaviour trees, towards an implementable design that can provide reasoning information in real-time.
翻译:情绪引导着我们的决策过程,但在实际伦理决策场景中却鲜少被探索。本研究针对这一挑战,探讨情绪如何影响家庭机器人情境中的伦理决策:机器人应执行哪些取物请求,以及执行或不执行的理由?我们重点论述情绪的两个方面:(1) 体细胞标记:待取物品被标记为负面属性(如危险品,例如刀具;或具有认知改变作用的物品,例如可能过量的药物),这为规避人工智能经典"框架问题"中的注意力聚焦提供了快速启发式方法;(2) 情绪推理:通过考虑用户的效价与唤醒水平,定义机器人应在何时及如何响应用户请求,例如谨慎考虑是否向情绪激动者交付危险物品。我们的情绪化方法为安全这一首要考量奠定基础,并通过支持基于情境(如用户年龄、过敏史)和隐私(如管理员设置)的优先级覆盖策略加以补充。透明度是解决方案的另一个关键要素。我们采用行为树定义解决方案,旨在实现可实时提供推理信息的可实施设计。