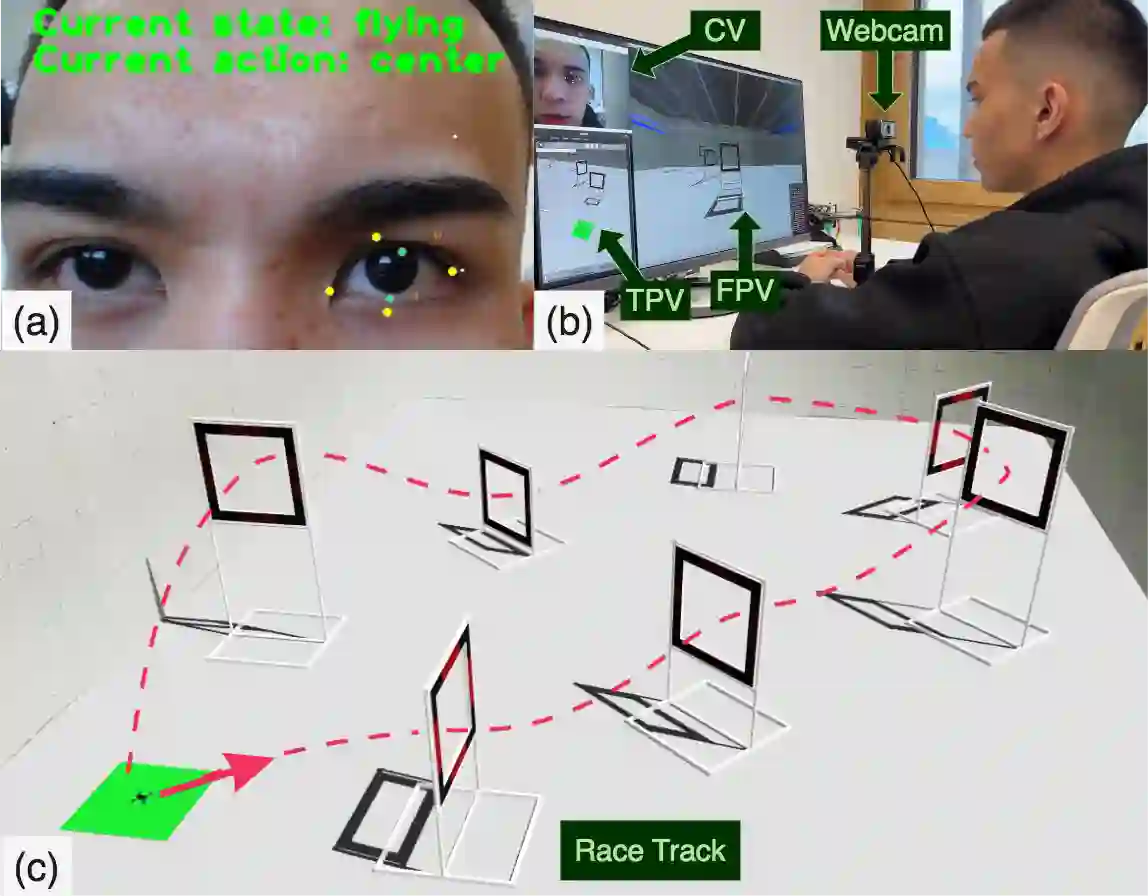
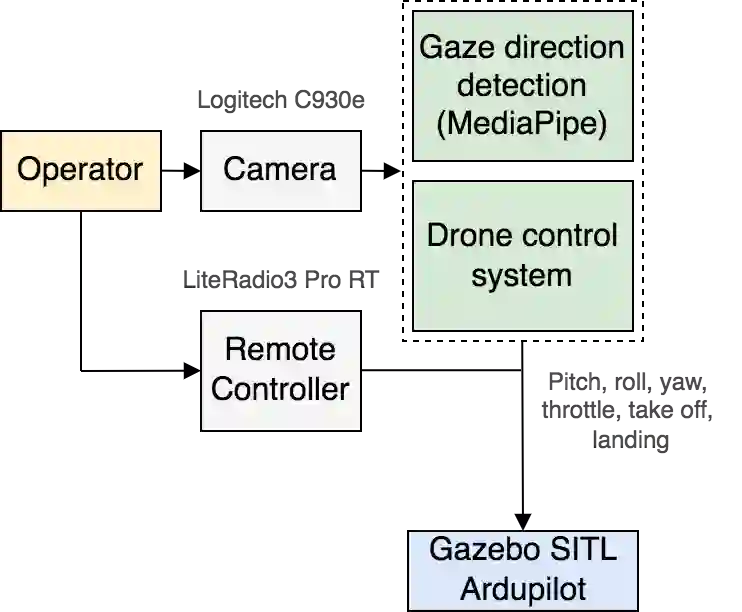
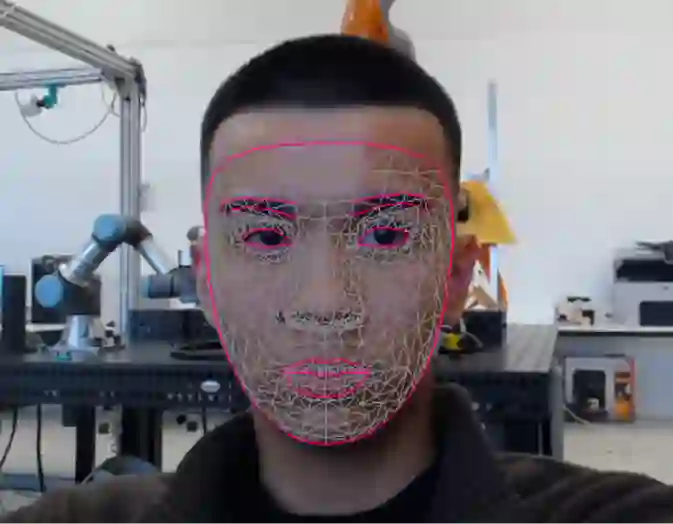
This paper introduces the GazeRace method for drone navigation, employing a computer vision interface facilitated by eye-tracking technology. This interface is designed to be compatible with a single camera and uses a convolutional neural network to convert eye movements into control commands for the drone. Experimental validation demonstrates that users equipped with the eye-tracking interface achieve comparable performance to a traditional remote control interface when completing a drone racing task. Ten participants completed flight tests in which they navigated a drone through a racing track in a Gazebo simulation environment. Users reduced drone trajectory length by 18% (73.44 m vs. 89.29 m) using the eye-tracking interface to navigate racing gates effectively. The time taken to complete the route using the eye-tracking method (average of 70.01 seconds) was only 3.5% slower than using the remote control method (also average of 70.01 seconds), indicating the good efficiency of the interface. It is also worth mentioning that four of the participants completed the race with an average time that was 25.9% faster than the other participants. In addition, users evaluated highly the performance (M = 34.0, SD = 14.2) and low frustration (M = 30.5, SD = 9.2) with the eye-tracking interface compared to performance (M = 63.0, SD = 10.1) and frustration (M = 49.0, SD = 11.7) with the baseline remote controller. The hedonic quality (M = 1.65, SD = 0.45) was also evaluated high by the users in the UEQ questionnaire.
翻译:本文介绍了用于无人机导航的GazeRace方法,该方法采用由眼动追踪技术实现的计算机视觉界面。该界面设计为兼容单摄像头,并利用卷积神经网络将眼动转换为无人机的控制指令。实验验证表明,配备眼动追踪界面的用户在完成无人机竞速任务时,其表现与传统遥控界面相当。十名参与者在Gazebo仿真环境中完成了飞行测试,操控无人机穿越竞速赛道。用户通过眼动追踪界面有效导航竞速门,将无人机轨迹长度缩短了18%(73.44米对比89.29米)。使用眼动追踪方法完成路线的耗时(平均70.01秒)仅比遥控方法(平均70.01秒)慢3.5%,表明该界面具有良好的效率。值得一提的是,其中四名参与者完成比赛的平均耗时比其他参与者快25.9%。此外,用户对眼动追踪界面的性能评分较高(M = 34.0,SD = 14.2)且挫败感较低(M = 30.5,SD = 9.2),而基准遥控器的性能评分(M = 63.0,SD = 10.1)和挫败感评分(M = 49.0,SD = 11.7)则相对较差。在用户体验问卷中,用户对该界面的愉悦性质量评分也较高(M = 1.65,SD = 0.45)。