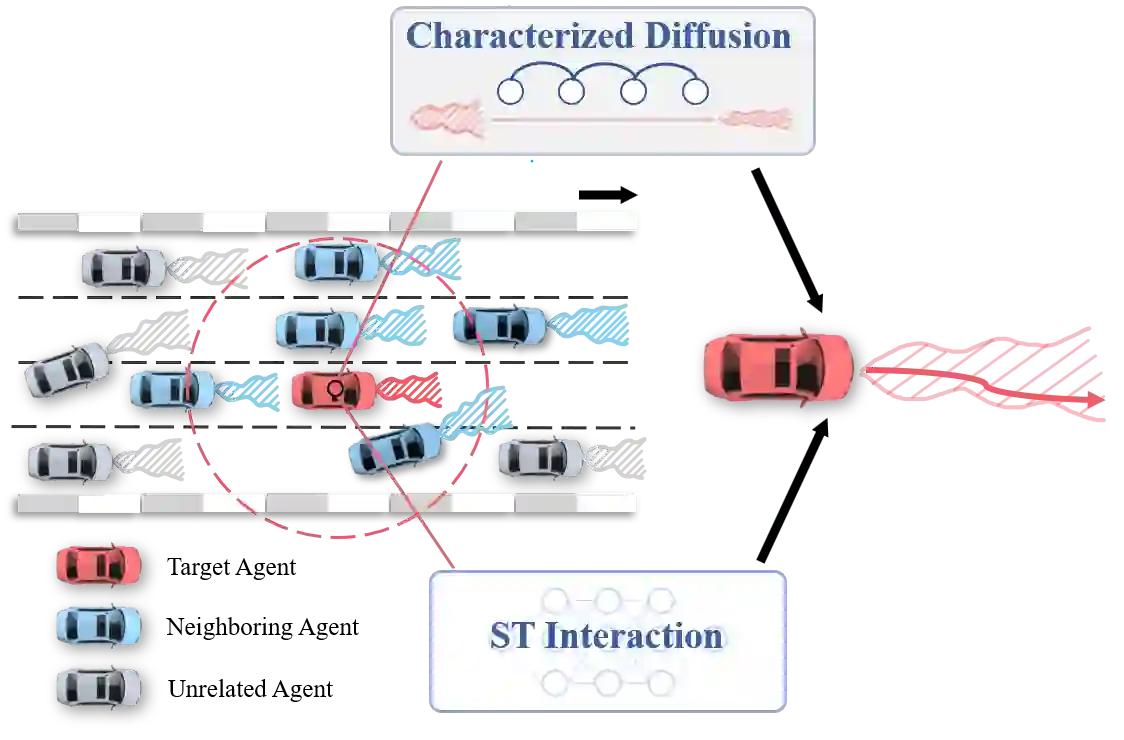
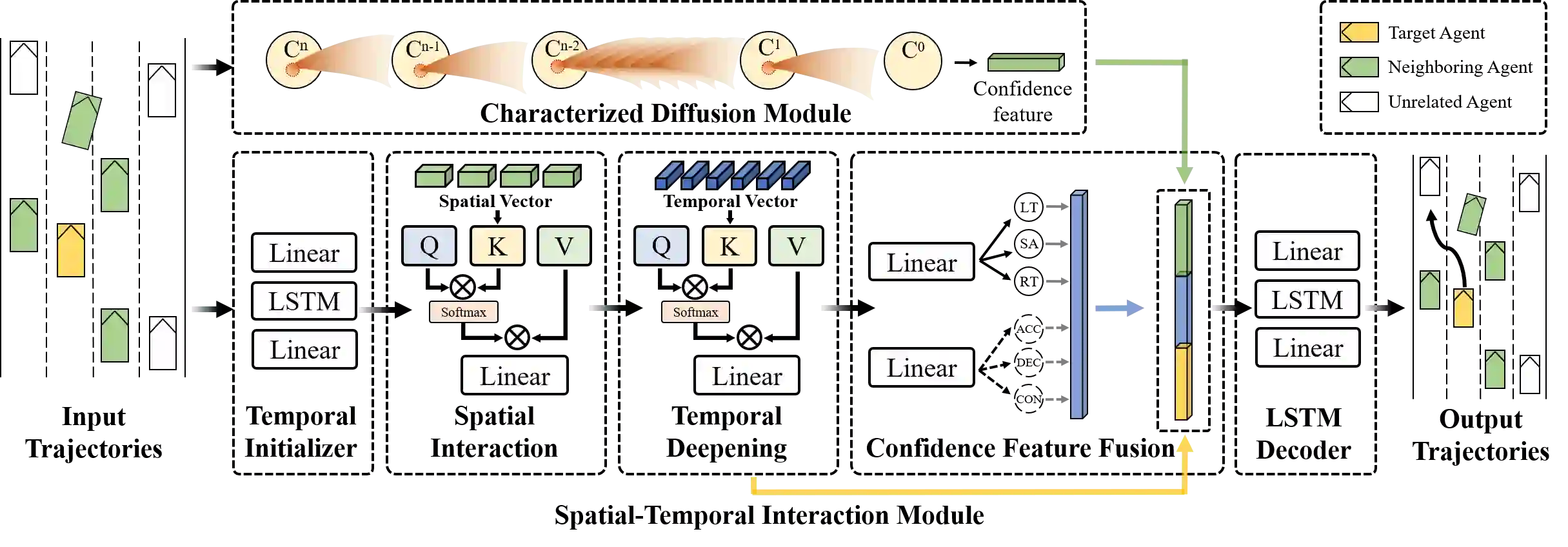
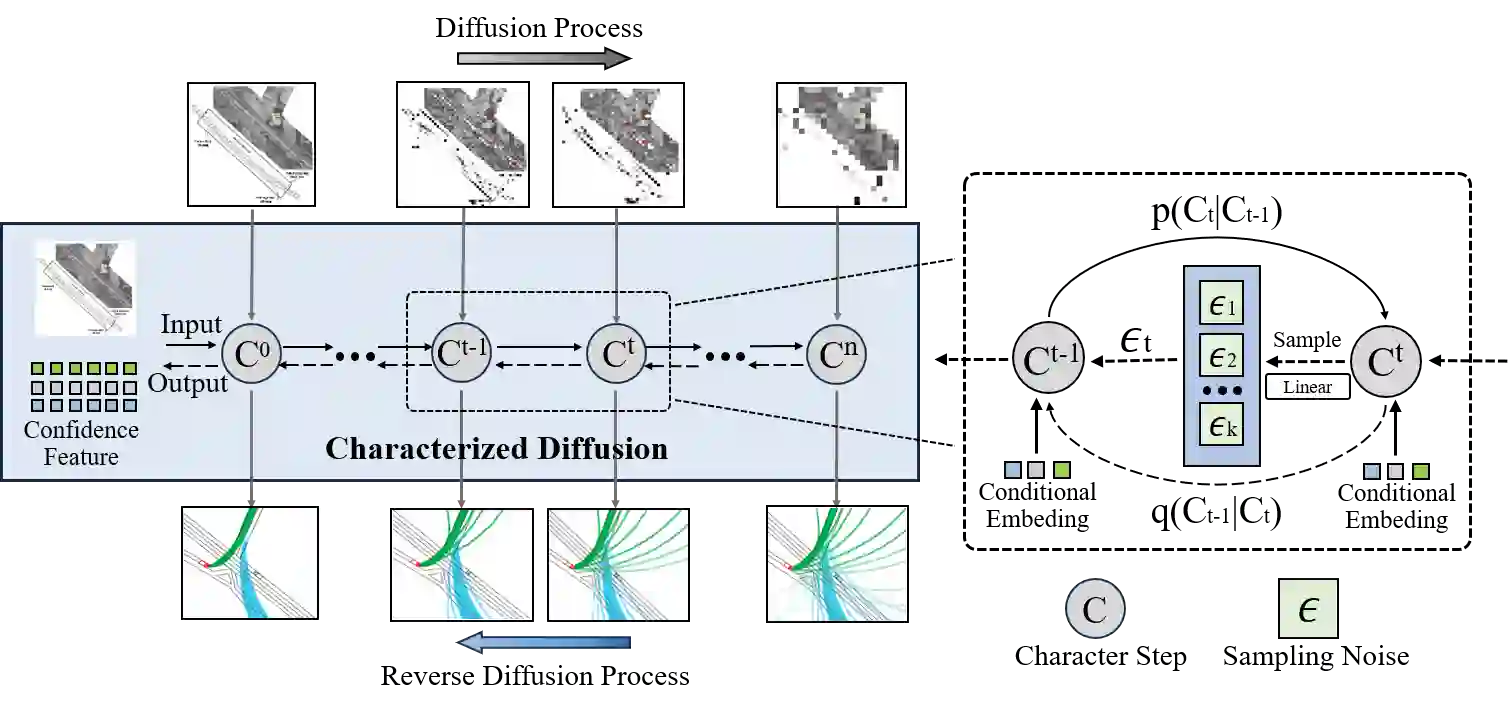
Trajectory prediction is a cornerstone in autonomous driving (AD), playing a critical role in enabling vehicles to navigate safely and efficiently in dynamic environments. To address this task, this paper presents a novel trajectory prediction model tailored for accuracy in the face of heterogeneous and uncertain traffic scenarios. At the heart of this model lies the Characterized Diffusion Module, an innovative module designed to simulate traffic scenarios with inherent uncertainty. This module enriches the predictive process by infusing it with detailed semantic information, thereby enhancing trajectory prediction accuracy. Complementing this, our Spatio-Temporal (ST) Interaction Module captures the nuanced effects of traffic scenarios on vehicle dynamics across both spatial and temporal dimensions with remarkable effectiveness. Demonstrated through exhaustive evaluations, our model sets a new standard in trajectory prediction, achieving state-of-the-art (SOTA) results on the Next Generation Simulation (NGSIM), Highway Drone (HighD), and Macao Connected Autonomous Driving (MoCAD) datasets across both short and extended temporal spans. This performance underscores the model's unparalleled adaptability and efficacy in navigating complex traffic scenarios, including highways, urban streets, and intersections.
翻译:轨迹预测是自动驾驶(AD)的基石,对于车辆在动态环境中安全高效地导航起着关键作用。针对该任务,本文提出了一种新型轨迹预测模型,旨在应对异构且不确定的交通场景以实现高精度预测。该模型的核心是特征化扩散模块,这一创新模块旨在模拟具有内在不确定性的交通场景。该模块通过注入详细的语义信息来丰富预测过程,从而提升轨迹预测精度。作为补充,我们的时空交互模块能够在空间和时间维度上有效捕捉交通场景对车辆动态的细微影响。通过全面评估,我们的模型在轨迹预测领域树立了新标杆,在下一代仿真(NGSIM)、高速公路无人机(HighD)和澳门网联自动驾驶(MoCAD)数据集上,无论短期还是长期时间跨度,均取得了最先进(SOTA)的结果。这一性能充分体现了模型在应对包括高速公路、城市街道和交叉路口等复杂交通场景时无与伦比的适应性和有效性。