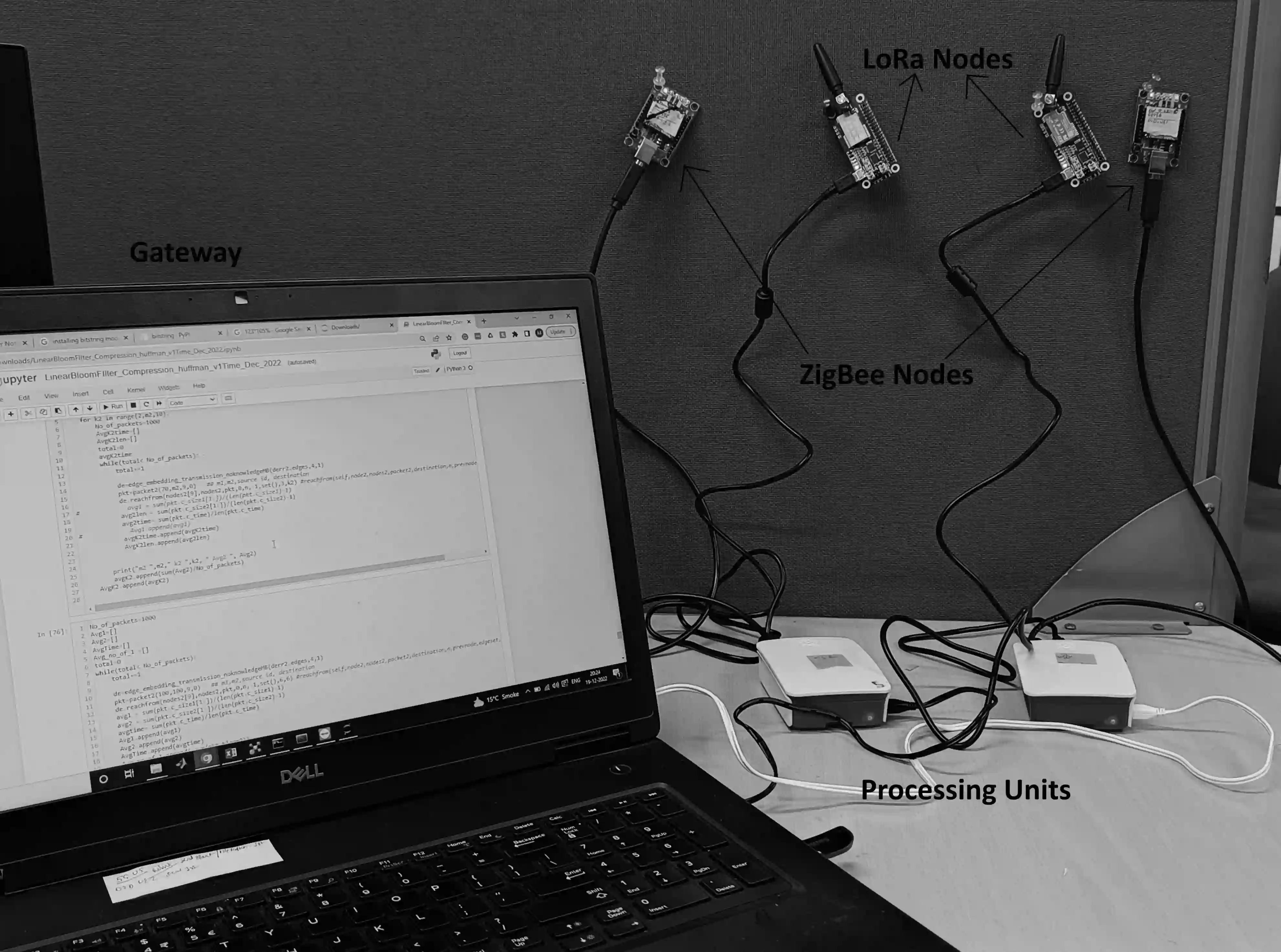
In Vehicle-to-Everything (V2X) networks that involve multi-hop communication, the Road Side Units (RSUs) typically desire to gather the location information of the participating vehicles to provide security and network-diagnostics features. Although Global Positioning System (GPS) based localization is widely used by vehicles for navigation; they may not forward their exact GPS coordinates to the RSUs due to privacy issues. Therefore, to balance the high-localization requirements of RSU and the privacy of the vehicles, we demonstrate a new spatial-provenance framework wherein the vehicles agree to compromise their privacy to a certain extent and share a low-precision variant of its coordinates in agreement with the demands of the RSU. To study the deployment feasibility of the proposed framework in state-of-the-art wireless standards, we propose a testbed of ZigBee and LoRa devices and implement the underlying protocols on their stack using correlated Bloom filters and Rake compression algorithms. Our demonstrations reveal that low-to-moderate precision localization can be achieved in fewer packets, thus making an appealing case for next-generation vehicular networks to include our methods for providing real-time security and network-diagnostics features.
翻译:在涉及多跳通信的车联网(V2X)网络中,路侧单元(RSU)通常希望收集参与车辆的位置信息以提供安全与网络诊断功能。尽管基于全球定位系统(GPS)的定位技术已被车辆广泛用于导航,但出于隐私考虑,车辆可能不会向RSU转发其精确的GPS坐标。因此,为平衡RSU的高精度定位需求与车辆隐私保护,我们提出了一种新的空间来源框架:车辆同意在满足RSU要求的前提下,在特定程度上妥协其隐私,并共享其坐标的低精度变体。为研究所提框架在现有无线标准中的部署可行性,我们构建了由ZigBee和LoRa设备组成的测试平台,并利用相关布隆过滤器与Rake压缩算法在其协议栈上实现了底层协议。实验结果表明:通过较少的数据包即可实现低至中等精度的定位,从而为下一代车载网络引入实时安全与网络诊断功能提供了有吸引力的方案。