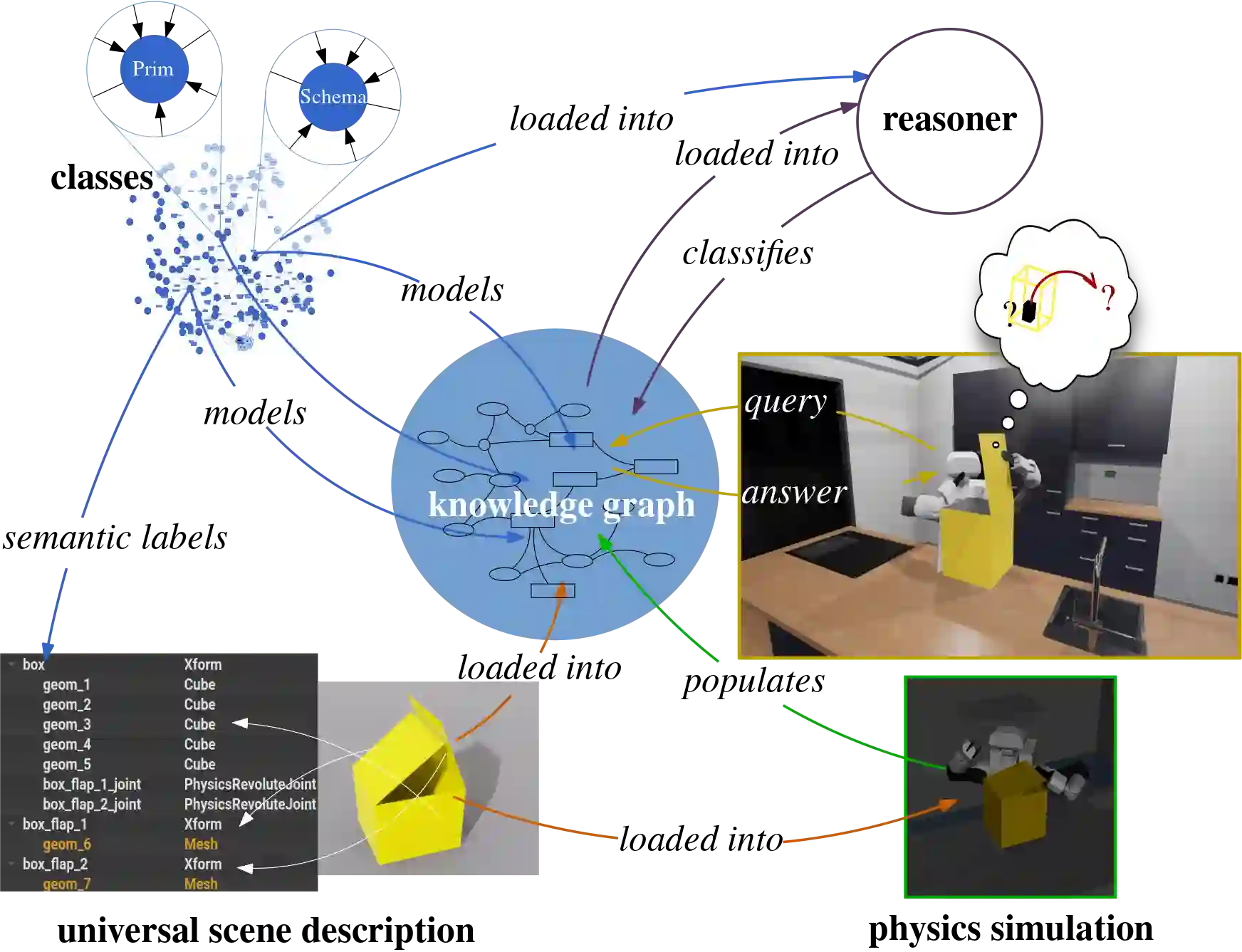
Robots performing human-scale manipulation tasks require an extensive amount of knowledge about their surroundings in order to perform their actions competently and human-like. In this work, we investigate the use of virtual reality technology as an implementation for robot environment modeling, and present a technique for translating scene graphs into knowledge bases. To this end, we take advantage of the Universal Scene Description (USD) format which is an emerging standard for the authoring, visualization and simulation of complex environments. We investigate the conversion of USD-based environment models into Knowledge Graph (KG) representations that facilitate semantic querying and integration with additional knowledge sources.
翻译:机器人执行人类尺度的操作任务时,需要大量关于周围环境的知识,才能以胜任且类人的方式完成动作。本研究探索了利用虚拟现实技术实现机器人环境建模的方法,并提出了一种将场景图转化为知识库的技术。为此,我们采用通用场景描述(USD)格式——这一新兴标准正被用于复杂环境的创作、可视化和仿真。我们研究了将基于USD的环境模型转化为知识图谱(KG)表示的方法,这种表示能够支持语义查询以及与其他知识源的集成。