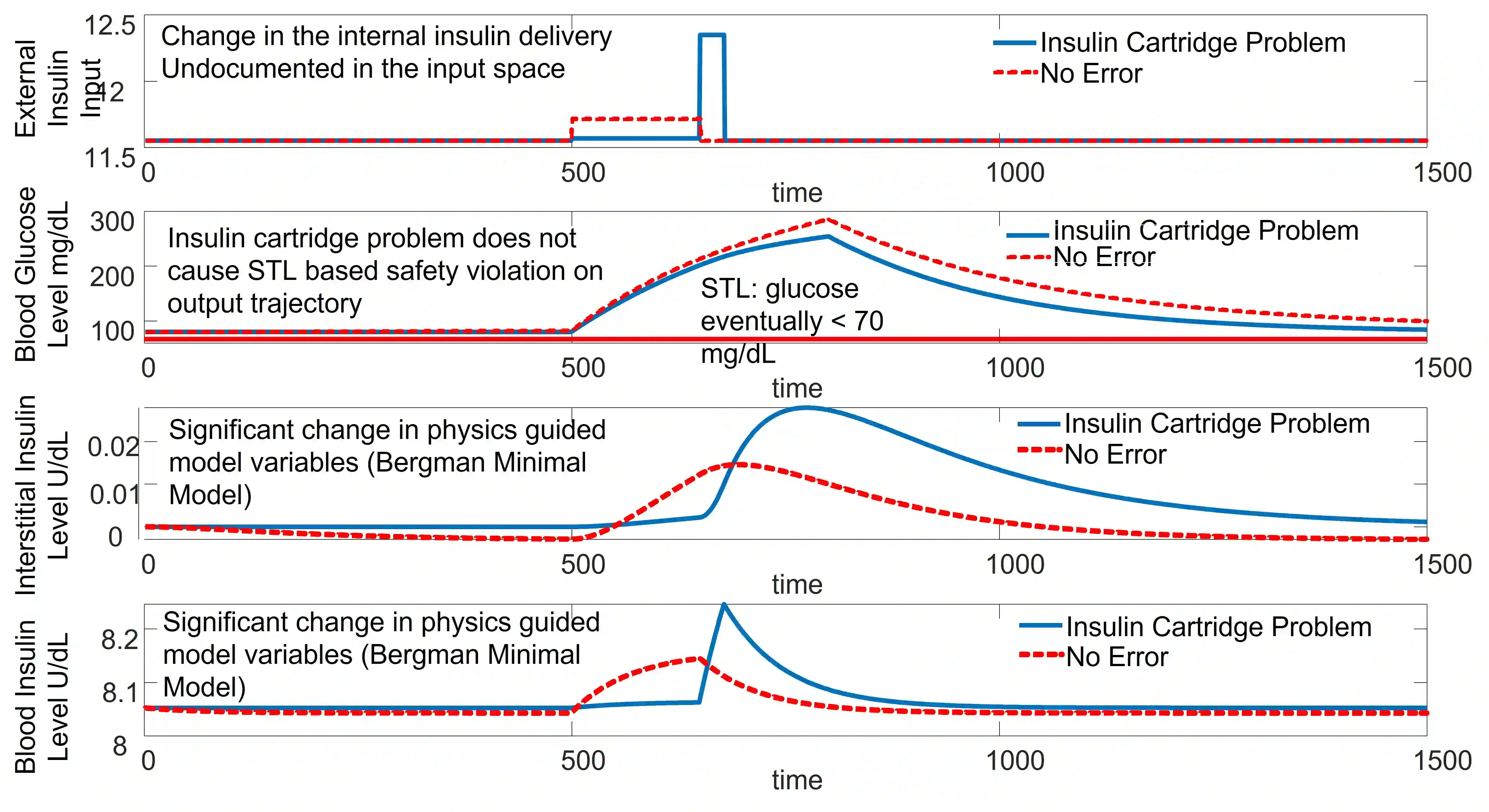
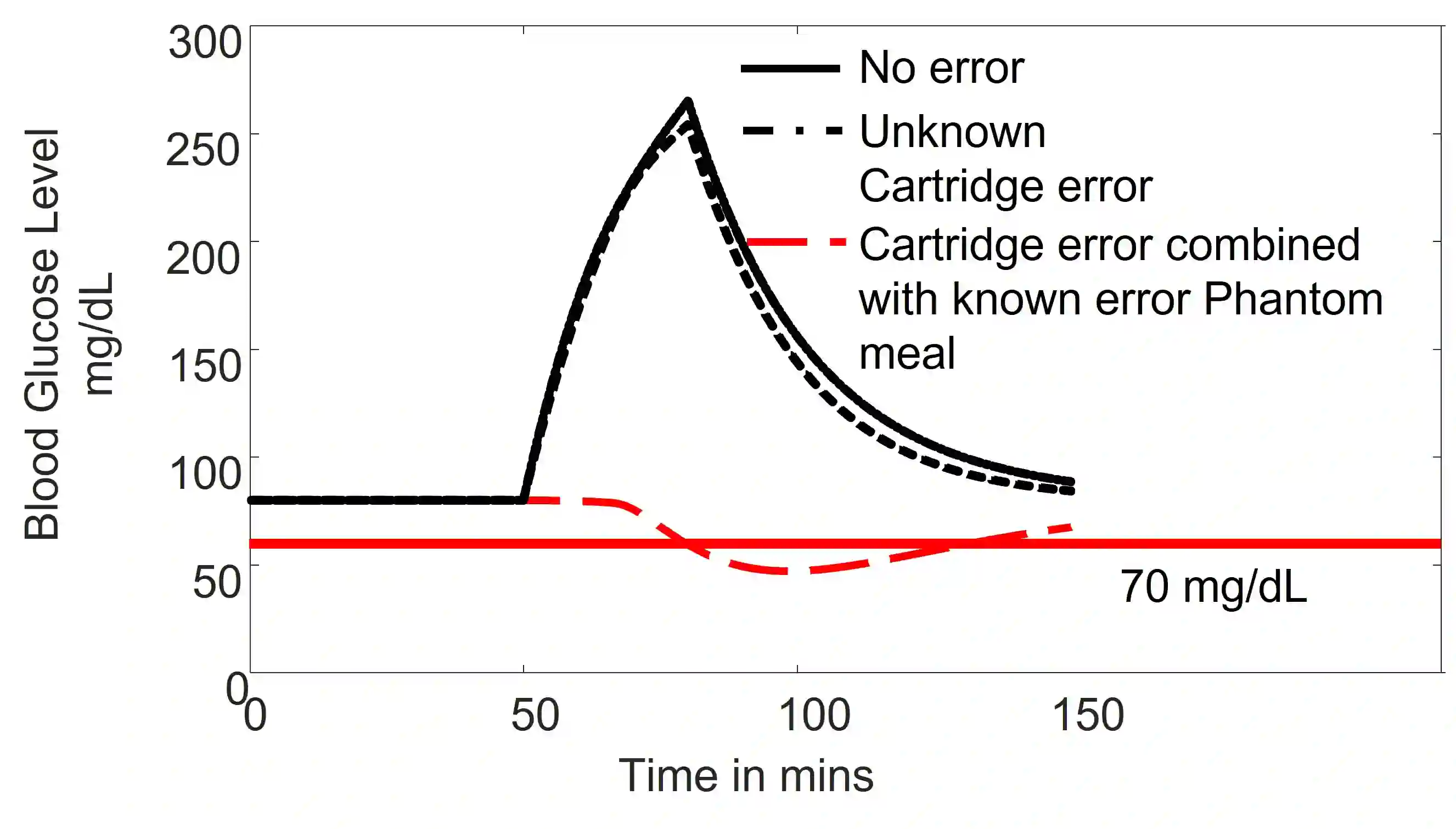
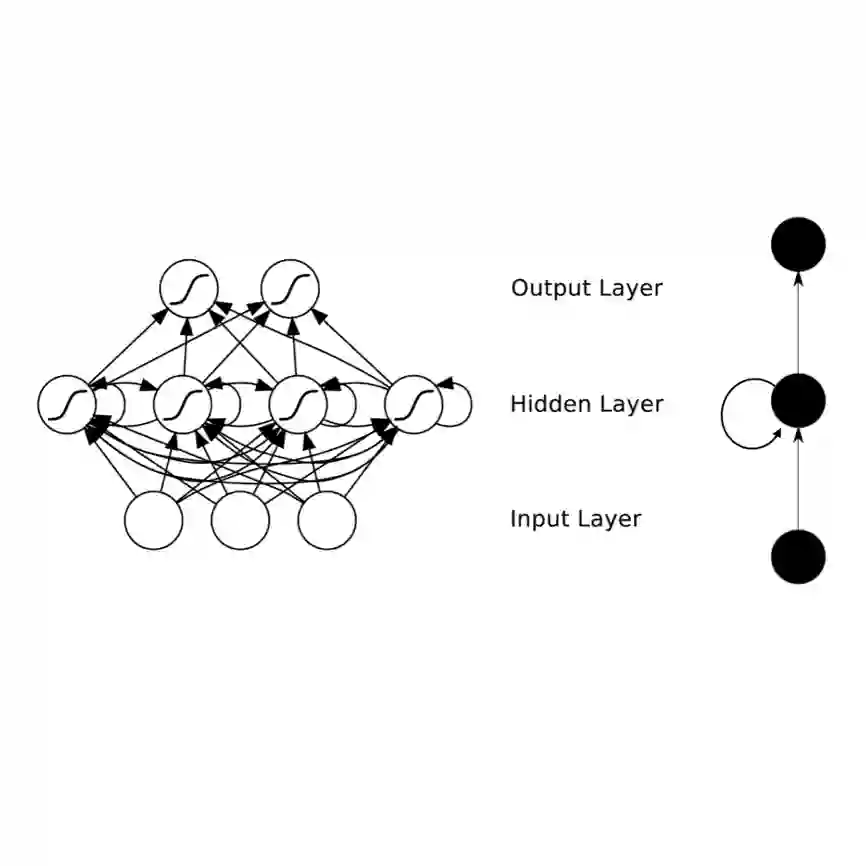
Unknown-unknowns are operational scenarios in systems that are not accounted for in the design and test phase. In such scenarios, the operational behavior of the Human-in-loop (HIL) Human-in-Plant (HIP) systems is not guaranteed to meet requirements such as safety and efficacy. We propose a novel framework for analyzing the operational output characteristics of safety-critical HIL-HIP systems that can discover unknown-unknown scenarios and evaluate potential safety hazards. We propose dynamics-induced hybrid recurrent neural networks (DiH-RNN) to mine a physics-guided surrogate model (PGSM) that checks for deviation of the cyber-physical system (CPS) from safety-certified operational characteristics. The PGSM enables early detection of unknown-unknowns based on the physical laws governing the system. We demonstrate the detection of operational changes in an Artificial Pancreas(AP) due to unknown insulin cartridge errors.
翻译:未知-未知是指在系统设计与测试阶段未被考虑的操作场景。在此类场景中,人机交互(HIL)人机共融(HIP)系统的运行行为无法保证满足安全性和有效性等要求。我们提出了一种新颖的框架,用于分析安全关键型HIL-HIP系统的运行输出特性,该框架能够发现未知-未知场景并评估潜在的安全隐患。我们提出了动力学诱导混合循环神经网络(DiH-RNN),用于挖掘物理引导替代模型(PGSM),以检测信息物理系统(CPS)偏离安全认证运行特性的偏差。基于支配系统的物理定律,PGSM能够实现对未知-未知的早期检测。我们验证了该框架在人工胰腺(AP)系统中因未知胰岛素药筒错误导致的运行变化检测能力。