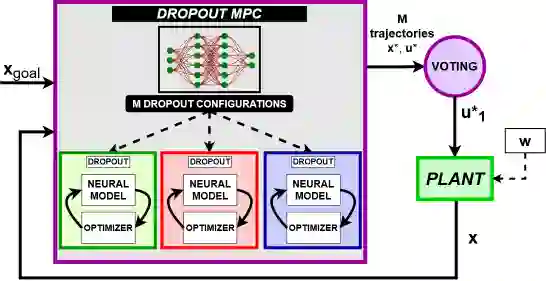
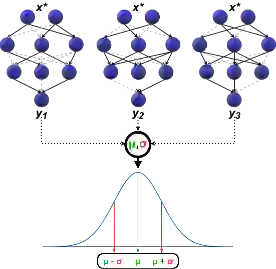
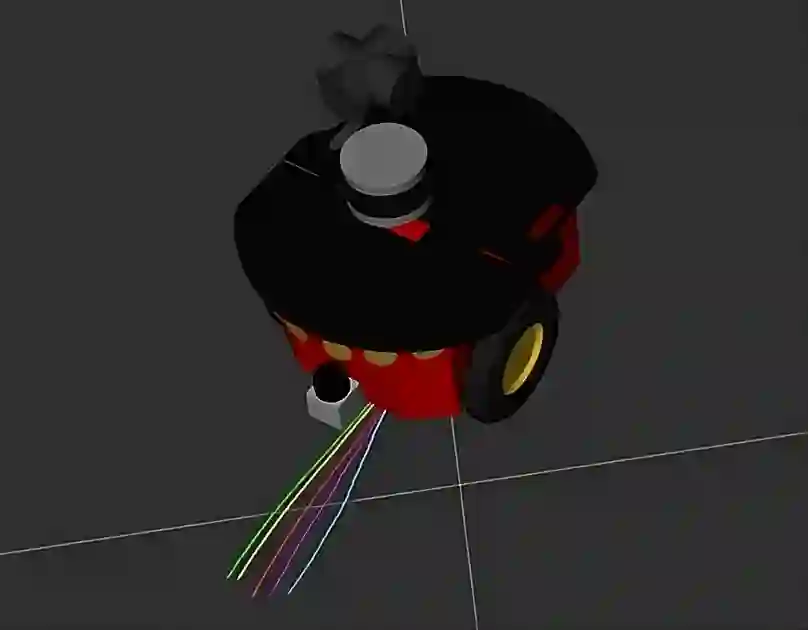
Neural networks are lately more and more often being used in the context of data-driven control, as an approximate model of the true system dynamics. Model Predictive Control (MPC) adopts this practise leading to neural MPC strategies. This raises a question of whether the trained neural network has converged and generalized in a way that the learned model encapsulates an accurate approximation of the true dynamic model of the system, thus making it a reliable choice for model-based control, especially for disturbed and uncertain systems. To tackle that, we propose Dropout MPC, a novel sampling-based ensemble neural MPC algorithm that employs the Monte-Carlo dropout technique on the learned system model. The closed loop is based on an ensemble of predictive controllers, that are used simultaneously at each time-step for trajectory optimization. Each member of the ensemble influences the control input, based on a weighted voting scheme, thus by employing different realizations of the learned system dynamics, neural control becomes more reliable by design. An additional strength of the method is that it offers by design a way to estimate future uncertainty, leading to cautious control. While the method aims in general at uncertain systems with complex dynamics, where models derived from first principles are hard to infer, to showcase the application we utilize data gathered in the laboratory from a real mobile manipulator and employ the proposed algorithm for the navigation of the robot in simulation.
翻译:近年来,神经网络在数据驱动控制领域中的应用日益增多,常被用作真实系统动力学的近似模型。模型预测控制(MPC)采用这一实践,催生了神经MPC策略。这引发了一个关键问题:经过训练的神经网络是否已充分收敛并泛化,使得所学模型能够准确逼近系统的真实动态模型,从而成为基于模型的控制(尤其是针对受扰动和不确定系统)的可靠选择。为解决这一问题,本文提出Dropout MPC——一种新颖的基于采样的集成神经MPC算法,该算法在学习得到的系统模型上采用蒙特卡洛Dropout技术。闭环控制基于一组预测控制器构成,这些控制器在每个时间步同时用于轨迹优化。集成中的每个成员通过加权投票方案影响控制输入,因此通过采用学习系统动力学的不同实现方式,神经控制在设计上变得更为可靠。该方法的另一优势在于其通过设计提供了估计未来不确定性的途径,从而实现谨慎控制。虽然该方法主要面向具有复杂动力学的不确定系统(这类系统通常难以从第一性原理推导模型),但为展示其应用效果,我们利用实验室采集的真实移动机械臂数据,在仿真环境中采用所提算法实现机器人导航。