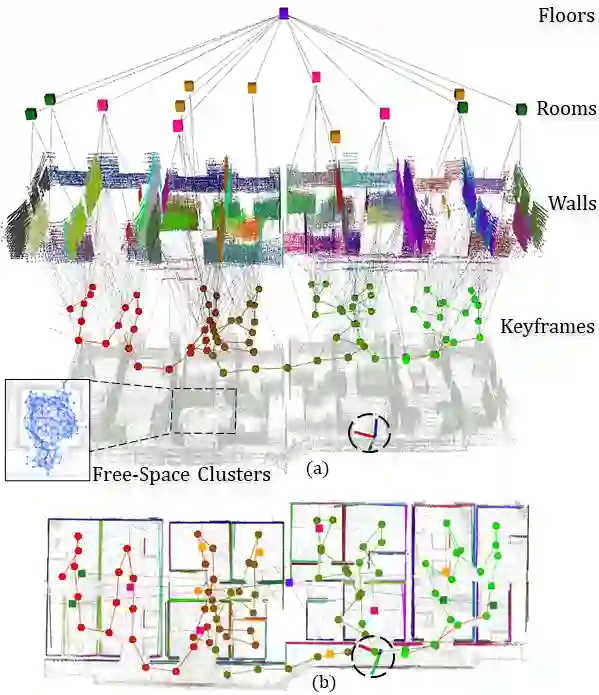
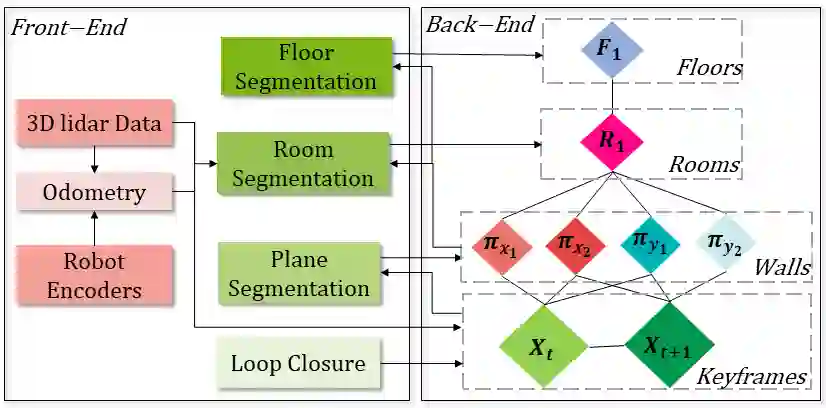
In this paper, we present an evolved version of the Situational Graphs, which jointly models in a single optimizable factor graph, a SLAM graph, as a set of robot keyframes, containing its associated measurements and robot poses, and a 3D scene graph, as a high-level representation of the environment that encodes its different geometric elements with semantic attributes and the relational information between those elements. Our proposed S-Graphs+ is a novel four-layered factor graph that includes: (1) a keyframes layer with robot pose estimates, (2) a walls layer representing wall surfaces, (3) a rooms layer encompassing sets of wall planes, and (4) a floors layer gathering the rooms within a given floor level. The above graph is optimized in real-time to obtain a robust and accurate estimate of the robot's pose and its map, simultaneously constructing and leveraging the high-level information of the environment. To extract such high-level information, we present novel room and floor segmentation algorithms utilizing the mapped wall planes and free-space clusters. We tested S-Graphs+ on multiple datasets including, simulations of distinct indoor environments, on real datasets captured over several construction sites and office environments, and on a real public dataset of indoor office environments. S-Graphs+ outperforms relevant baselines in the majority of the datasets while extending the robot situational awareness by a four-layered scene model. Moreover, we make the algorithm available as a docker file.
翻译:本文提出情境图(Situational Graphs)的进化版本,该模型在单一可优化因子图中联合建模SLAM图(作为一组机器人关键帧,包含其相关测量值与位姿)与3D场景图(作为环境的高层表示,编码具有语义属性的不同几何元素及其相互关系)。所提出的S-Graphs+是一种新型四层因子图,包含:(1)具有机器人位姿估计的关键帧层;(2)表示墙面表面的墙壁层;(3)包含墙面平面集合的房间层;(4)聚合给定楼层内所有房间的楼层层。通过实时优化上述因子图,可在构建并利用环境高层信息的同时获得鲁棒且精确的机器人位姿与地图估计。为提取此类高层信息,本文提出基于已映射墙面平面与自由空间聚类的新型房间与楼层分割算法。我们在多个数据集上测试S-Graphs+,包括不同室内环境的仿真场景、多个建筑工地与办公环境采集的真实数据集,以及公开的室内办公环境真实数据集。实验表明,S-Graphs+在大多数数据集上优于相关基线方法,并通过四层场景模型扩展了机器人的情境感知能力。此外,本算法以Docker文件形式公开发布。