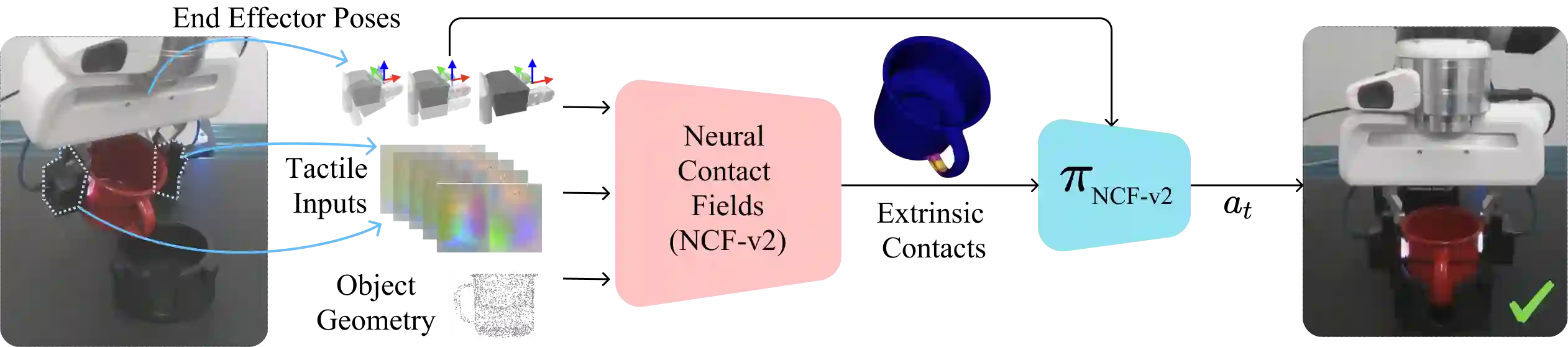
Robotic manipulation tasks such as object insertion typically involve interactions between object and environment, namely extrinsic contacts. Prior work on Neural Contact Fields (NCF) use intrinsic tactile sensing between gripper and object to estimate extrinsic contacts in simulation. However, its effectiveness and utility in real-world tasks remains unknown. In this work, we improve NCF to enable sim-to-real transfer and use it to train policies for mug-in-cupholder and bowl-in-dishrack insertion tasks. We find our model NCF-v2, is capable of estimating extrinsic contacts in the real-world. Furthermore, our insertion policy with NCF-v2 outperforms policies without it, achieving 33% higher success and 1.36x faster execution on mug-in-cupholder, and 13% higher success and 1.27x faster execution on bowl-in-dishrack.
翻译:机器人操作任务(如物体插入)通常涉及物体与环境之间的交互,即外部接触。先前关于神经接触场(Neural Contact Fields, NCF)的研究利用夹爪与物体之间的内在触觉传感来模拟外部接触估计,但其在真实世界任务中的有效性和实用性尚不明确。本研究改进了NCF以实现从仿真到真实的迁移,并将其用于训练马克杯放入杯托和碗放入碗架这类插入任务的策略。我们发现,我们的模型NCF-v2能够估计真实世界中的外部接触。此外,采用NCF-v2的插入策略在性能上优于未使用该模型的策略:在马克杯放入杯托任务中,成功率提升33%,执行速度加快1.36倍;在碗放入碗架任务中,成功率提升13%,执行速度加快1.27倍。