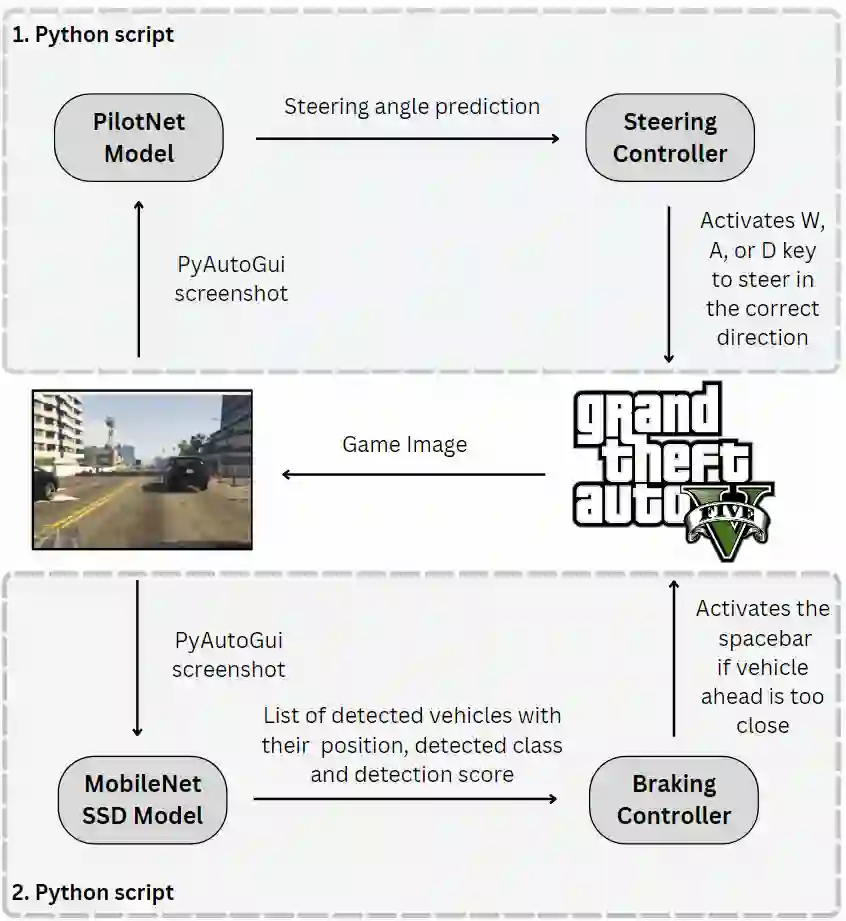
The technology of autonomous driving is currently attracting a great deal of interest in both research and industry. In this paper, we present a deep learning dual-model solution that uses two deep neural networks for combined braking and steering in autonomous vehicles. Steering control is achieved by applying the NVIDIA's PilotNet model to predict the steering wheel angle, while braking control relies on the use of MobileNet SSD. Both models rely on a single front-facing camera for image input. The MobileNet SSD model is suitable for devices with constrained resources, whereas PilotNet struggles to operate efficiently on smaller devices with limited resources. To make it suitable for such devices, we modified the PilotNet model using our own original network design and reduced the number of model parameters and its memory footprint by approximately 60%. The inference latency has also been reduced, making the model more suitable to operate on resource-constrained devices. The modified PilotNet model achieves similar loss and accuracy compared to the original PilotNet model. When evaluated in a simulated environment, both autonomous driving systems, one using the modified PilotNet model and the other using the original PilotNet model for steering, show similar levels of autonomous driving performance.
翻译:自动驾驶技术目前正引起研究界和工业界的广泛关注。本文提出了一种深度学习双模型解决方案,利用两个深度神经网络实现自动驾驶车辆的联合制动与转向控制。转向控制采用NVIDIA的PilotNet模型预测方向盘转角,制动控制则基于MobileNet SSD模型。两个模型均依赖单个前置摄像头获取图像输入。MobileNet SSD适用于资源受限设备,而PilotNet在资源有限的小型设备上运行效率低下。为使其适应此类设备,我们通过自主原创网络设计对PilotNet模型进行改进,将其模型参数数量和内存占用降低约60%。推理延迟也相应减少,使模型更适用于资源受限设备。改进后的PilotNet模型在损失和准确率方面均与原版PilotNet模型表现相当。在仿真环境评估中,分别采用改进版PilotNet模型和原版PilotNet模型进行转向控制的两个自动驾驶系统,展现出相近的自动驾驶性能水平。