一般而言,将“思考蜂群”视为一种协同解决问题过程,其中一群个体以去中心化和自组织的方式共同工作,从而可以利用群体的集体智能,以比任何个体单独行动更有效的方式解决复杂问题。这包括之前来自生物学的例子,但其范围更广,涵盖:
- 生物群体:哺乳动物、昆虫、鱼类、细菌、病毒和细胞,包括人脑中的神经元
- 人类群体:头脑风暴会议、焦点小组、抗议活动和快闪活动
- 机器(机器人)群体:协同工作以执行复杂任务的物理机器人
- 机器(计算)群体:包括人工智能、机器人和软件病毒在内的网络机器人
- 人机群体:为解决复杂问题而进行的协同思考,如社交媒体、机器人牧群和僵尸网络
尽管包含排斥、对齐和吸引等简单局部社会互动规则的模型已足以生成蜂群形态,但这些来自自然的实例让我们有理由断言,还有更多可能性。本文代表了对未来技术发展的思想领导力至关重要的一小部分跨学科视角。将本书结构安排为如下所述的五个部分。
第一部分:思考蜂群的基础
“思考蜂群”这个标题有两层含义。第一,是关于蜂群的思考:它是一系列探索蜂群主题思想的文章和论文的合集。第二,是对一个更精炼理念的探索:蜂群不仅仅是遵循由简单、相同的自动机通过局部互动来实现全局效果的传统概念;而是指那些既能个体思考又能集体思考的蜂群。
第一章是一次为期一天研讨会的结果,来自学术界、工业界和政府部门的研究人员与专业人士齐聚一堂,共同探讨“思考蜂群”这一主题。该讨论的定义性特征体现在这里对“蜂群”和“思考”概念的广泛理解,以及两者如何可能交织在一起。因此,一个思考蜂群既包括个体将其能动性让渡给集体,也包括集体将其自身让渡给个体。它是由具有思考能力的实体构成的系统——这些实体拥有独立于集体之外的自身能动性、目的和“生命”,有其独特的表现形式,但它们也共享信息、目标,并可能服从于集体。
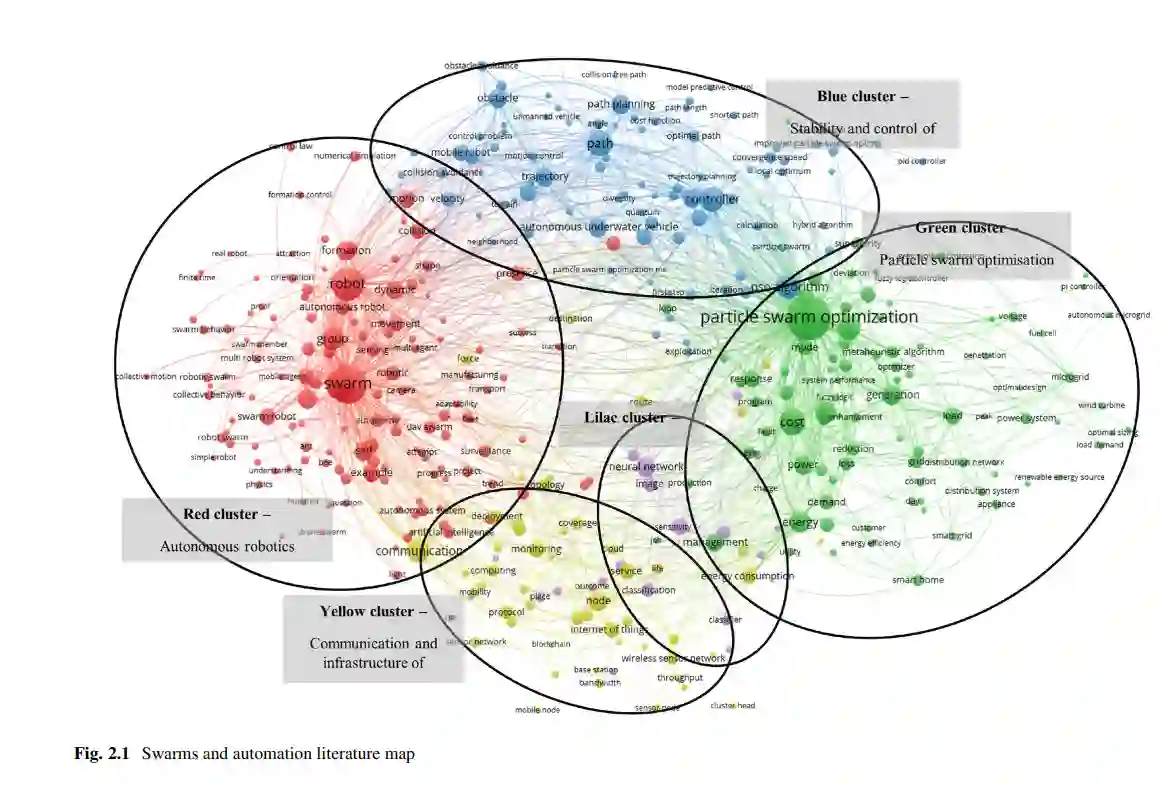
在这篇引言部分,首先探讨了群体机器人学的传统观点。第二章通过科学计量学分析了开放文献中的研究人员如何讨论自主性、集群和协同。这为术语提供了一个清晰的基线,以补充第一章提出的功能和本体论“模型”。第三章从群体智能和群体优化的视角,阐述了关于蜂群的各种定义。本章有助于形成蜂群的概念化,为后续章节奠定框架。
这三章植根于始于贝尼和王[108]的传统,但第四章带领读者开启了一段背离传统的哲学之旅,它运用“嵌合”概念,挑战了从生物学角度思考蜂群的假设。最后,本部分以探讨大众媒体如何呈现蜂群概念作结。第五章始于对认知的关切,鉴于当前全球对致命性自主武器系统的关注,这一点具有现实意义,并建立了一个基于价值的视角,为后续讨论提供参考。
第二部分:思考蜂群——行为
当人类观察任何自主系统时,他们通常首先看到的,除了其静态物理外观,就是它如何在时间和空间中动态地行为,包括孤立状态下的行为以及对刺激的响应。在第一章中,作者讨论了描述我们如何解读所看到的“具身外观”和“观察到的行为”的重要概念,提出了核心问题:外观如何影响我们对一个系统的感知,特别是其“承载价值的程度”?它如何支持“可解释性”、信任和保证等基本要求?对此,我们或许可以补充以下问题:我们看到的是否真正代表了正在发生的情况?如果不是,我们能否超越显而易见的外观,看到隐藏的东西?
作为系统的使用者和监管者,对系统的外部观察(无论是其外观还是行为)通常是我们了解系统本身、其内在能力及其倾向的唯一信息来源。作为设计者,外观(静态和动态)是将我们的设计与系统所处的更广泛社会系统联系起来的接口。系统的行为方式是我们理解、预测并最终信任该系统的基础。难以理解或混乱的行为会削弱用户的信任,但可能会增加对对手的不可预测性。合作和主动行为暗示了一定程度的智能或意图,而这种智能或意图可能并不存在,从而产生不切实际的期望。
第六章探讨了在缺乏内部知识的情况下观察一个系统时所面临的解读挑战,提出了一个诠释学框架和一种实验方法,以更好地理解我们如何解读一个系统,以及这种解读如何产生信任。然而,某些类型的行为是否或多或少更重要?诠释学的研究能否说明,一个系统表达情感或展示“助人”行为的能力,是否会以牺牲有效性为代价来增强可解释性?第七章为我们提供了一条从噪声中识别连贯行为和结构的途径。当我们观察任何大规模系统时,在混乱中发现连贯性是一个基本挑战,并且这仍然是可解释性概念的核心。第八章将故事分析和数学结合起来,应用信息论中的技术来更好地预测社会行为。作者建议,观察到的行为可以被转换并存储在信息域中,使得智能体能够在信息论领域对行为事件进行推理。
最后,本部分以两章结束。第九章通过审视海上自主系统的监管现状以及集群如何可能挑战这些方法,探讨了如何从监管角度构建行为框架的问题。第十章讨论了设计选择与所需法律之间的关系,这为前一章的监管工作提供了一个互补的视角。与第六、七章不同,这两章从一组预期的行为(合法性)出发,阐明了在现实世界条件下运行的系统产生这种行为所需的设计要求和政策选择。
第三部分:思考蜂群——拓扑与架构
与对系统外观的观察不同,底层的架构拓扑和推理机制(感知、规划和反应)是开发者做出的设计选择。它们是“如何”,而行为是“什么”。这并不意味着一个主题比另一个更重要。我们设计系统是为了展现期望的行为,并且我们根据可行的工程解决方案来调整我们的预期行为。在引言中,我们提出了以下问题:什么控制拓扑支配着系统或蜂群的功能?它是既定的、动态的还是演化的?系统如何在拓扑模型之间转换,并保持目的和功能的连贯性?“思考蜂群”如何思考?认知策略的常规流程和过程是什么,它们与其他三个主题的关系如何?
在这一系列论文中,作者探索了设计能够展现理想(或至少非不良)行为结果的系统的方法,提供了对技术途径、方法和实验结果的见解。本部分从第十一章开始,该章规定了一种架构拓扑,它提供了一个多智能体系统,能够灵活地实例化智能体(虚拟和真实)社群,这些智能体可以在动态环境中进行交流和协作。他们的工作建立在帕斯克的“对话骨架”基础上,通过引入态势感知、意义建构以及诸如“框架”和“类比”等叙事手段来扩展它。
第十二章提出了一种仅使用局部互动和通用通信拓扑的控制机制,以从多智能体系统中产生不同的行为模式,突出了一种通过局部互动和简单认知架构来实现行为属性的方法。最后,第十三章涵盖广泛领域,包括对集群系统各要素的全面回顾。为此,它与本文的许多主题层面都相关。然而,吉汉在水下集群机器人学挑战背景下对集群架构的回顾尤其值得注意,不一定是因为它全面,而是因为它突出了由施加于工程师的概念性假设和限制所产生的拓扑架构。尚待回答的问题是,随着自主性的发展,这些假设是否仍然有效。
第四部分:思考蜂群——认知
认知是思考的核心。在前面的部分中,我们提出了定义、形式和行为以及拓扑。所有这些对于实现有效且合乎道德地使用群体机器人学的目标都至关重要。然而,任何自主系统,尤其是思考蜂群的核心,是其接收输入、根据其“所知”和“意图”进行校准,然后行动的过程。
机器认知,即使在单个系统中,也是一个在学术文献中已经并将继续深入探讨的主题。本部分从三个视角探讨了蜂群可能如何思考,以及这种认知过程如何能支持智能的集体和个体行为。这三章中的每一章都对蜂群如何思考和学习的概念提出了不同的视角。前两章明确地在向蜂群传授行为的背景下解决了这个问题。第三章将多种机器认知方法综合成一个更复杂的整体。
第十四章探讨了使用遗传算法框架,并利用模拟让集群智能体在一个网络因局部效应而中断的复杂环境中,通过行为测试、构建/进化和选择的过程(该过程使用模式匹配规则来实现变化环境中的选择),学习如何进行最佳通信,从而在蜂群中灌输丰富行为的挑战。
第十五章提出了一个课程体系,以系统化学习过程,并在设计行为中融入专家知识,重点讨论了三种课程设计方法,即以学习者为中心、以教师为中心和混合式,并使用了一系列案例研究。史密斯和侯赛因从概念对立面共同考察了行为。
第十六章在很多方面是本书的完美结尾。约翰逊等人是试图为终端用户解决现实世界中端到端集群问题的现场机器人专家。他们的章节从人类意图、人类和机器人感知的概念开始,通过应用从机器学习到信息熵的一系列技术,部署了一个多机器人系统,该系统能动态地(个体和集体)响应人类在地面上的行为,同时协调整个系统的努力以实现全局效果。
第五部分:思考蜂群——未来之路
第十七章通过汲取所有章节的线索,提出了仍悬而未决或至少需要进一步研究的问题,以此作为本书的总结。本章探讨了各种各样的问题,从社会科学和人文问题,到关于建模、模拟和机器人学的技术问题。