

引言
群体行为,是指使具有群落结构的生物,如鸟类、鱼类和一些细菌,聚集在一起并移动或与群内成员一起移动的行为。1986年,计算机图形专家克雷格-W-雷诺兹(Craig W. Reynolds)首次测试了群体行为,用一个名为BOIDS的模拟程序在计算机环境中研究鸟群。该模拟允许鸟群根据基本规则以简单的因素行事(雷诺兹工程与设计)。生物作为一个群体,解决它们无法单独解决的问题的能力,被称为群居智能。
在群体行为中,运动是由一个共同的智能决定的,这表明群体智能。如果它适应于牧群技术,通过在多个牧群成员之间划分相同的任务,可以从畜群中获得最大的效率和可持续性(Kaplan,2021)。
集群技术的历史
在文章的这一部分,机器人领域的一般集群系统将被称为 "集群机器人系统"。在文章的其他主题中,将详细解释集群机器人系统的成员要素(UAV、IDA和IKA),并进行系统区分。集群机器人技术是一个研究自然生活中的集群行为并试图将其适应于机器人系统的领域。集群技术领域试图将自然界中蚂蚁、鸟类和鱼类等生物的集群功能,如相互组织、具有自主结构、合作和协调等,作为一种灵活、可扩展和稳健的结构适应于机器人系统。集群机器人系统;它一般在没有中央实体控制集群成员的情况下运行。集群成员之间的通信是机器人对机器人或机器人对环境(roboticsbiz.com,2022)。图1中给出了自然界中群居生活的一个例子。
在机器人领域,"集群"这一主题在1988年G. Beni的作品 "细胞机器人系统的概念 "以及T. Fukuda和S. Nakagawa的 "动态可重构机器人系统的方法 "中被使用。正如G. Beni所言,细胞机器人在n维环境中自主运行,并在没有中央实体的情况下进行有限的通信协调。根据G. Beni的说法,这些机器人以协调的方式合作,以实现一个共同的目标(Cheraghi等人,2021)。
T. 福田则表示,作为他研究的结果,一群以集群逻辑行动的机器人可以像人体的细胞一样聚集在一起,完成复杂的任务。1989年,G.Beni和J.Wang在第七届日本机器人协会会议上使用了集群智能一词,声称机器人系统可以通过协调它们来显示智能行为(Eberhart等人,2001)。Ronald Kube和Hong Zohng;在1993年,他们建立了一个多机器人系统(集群机器人),其灵感来自于自然界蜂群的行为。Gregory Dudek和他的队友在同一年为集群机器人;他致力于研究集群大小、通信范围和间隔、集群元素之间的通信拓扑结构、通信带宽、集群组织、蜂群异质性或同质性等概念,这些概念描述集群元素的能力。在这些研究中,可以说是集群系统的鼻祖,集群机器人、多机器人系统或集群系统等概念是同义的,但这些概念在不同的名称中使用,是当时没有明确术语的原因。
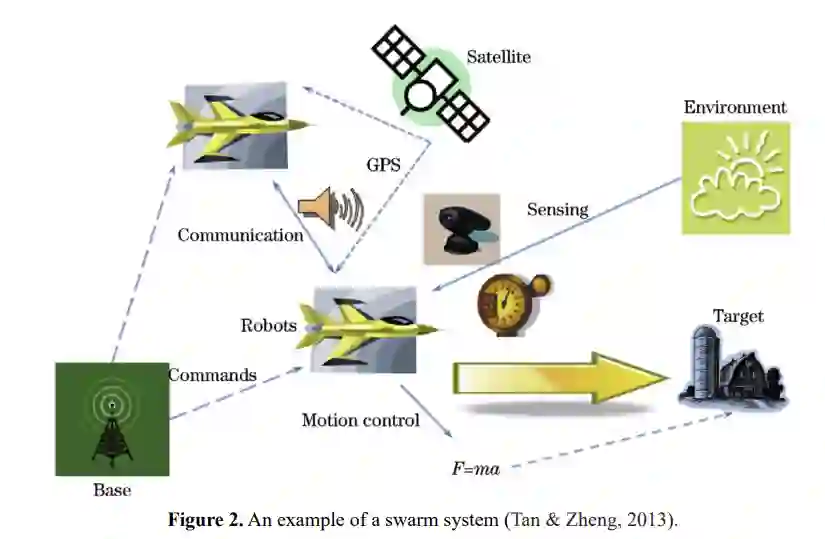
研究集群系统的Beni在2004年提出,集群成员应该有一个简单、相同、可扩展和本地的通信系统。Beni提出的概念甚至在今天也构成了集群系统的基础(Cheraghi等人,2021)。图2中给出了一些系统的例子。
集群智能与机器人
集群机器人;它是通过使用集群智能软件和集群通信方法与可以单独工作的机器人协调,为某种目的工作的系统。为了在现场有效和成功地实施集群机器人,需要能够快速组织并采取不同形式的技术。这种需求在轻型、小型、具有成本效益和可牺牲的机器人(UAV、UGA和IDA)中得到了体现(Alemdar,2021)。
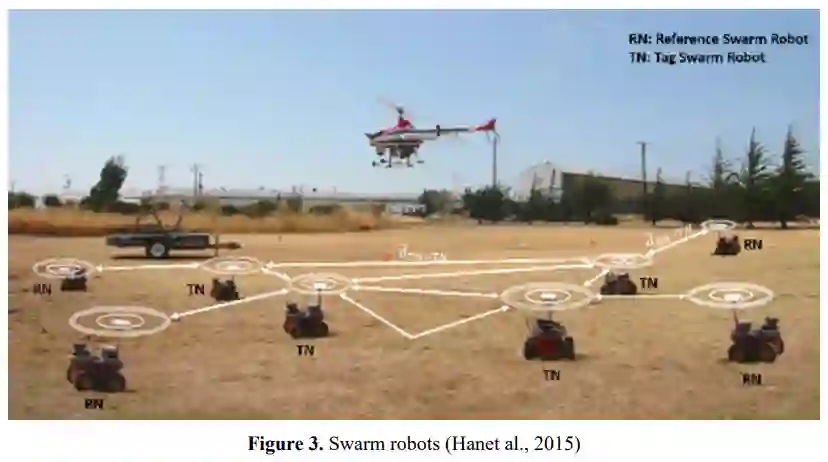
集群机器人;它们通过集群算法接收和给集群元素的通信单元提供各种数据,使用集群通信来相互沟通。一般来说,在集群算法中,集群元素根据局部规则行事,一般行为是在集群元素相互之间或与环境的互动中产生的。根据"集群机器人行为和当前应用 的研究,通过将单个机器人转换到集群机器人领域;它表现出基于本地规则集的行为,其范围可以从传感器输入和执行器输出之间的简单反应式映射到精心设计的本地算法。有关的行为包括集群机器人之间或与环境的互动(Schranz等人,2020)。图3显示了一个集群机器人的阵列。
交互;它包括从集群成员的传感器中读取数据,处理集群成员的任务计算机或相关单元的计算机,并将处理后的数据转化为执行器的反应(Floreano & Mattiussi, 2008)。通过重复这种互动,群落的基本行为被定义。在进入集群机器人的使用领域或工作原理之前,有必要研究一下 "牧群智能 "的基本原理,科学家们通过观察自然界中的动物群,抽象出它们的行为模式,从而创造出 "牧群智能"。
感知
感知,是构成集群智能的基础的因素之一,对于良好的应用集群智能非常重要。在与环境的交互中,集群成员需要通过扫描其周围的一般威胁/机会或朋友/敌人的困境,即时将关键因素或情况传递给他所处的群体。它通过在正确的时间单独检测威胁/机会数据并将相关数据传输给群体的其他成员来提供感知。感知决定了牧群的命运(Alemdar,2021)。
自主性和自治性
集群智能与典型的机器人层级流程最大的区别在于,集群中的每个元素都可以通过其传感器自行收集数据,并利用相关数据做出决策,通过使用机器人上的执行器,对微控制器做出的决策做出反应,而微控制器就是集群成员。集群机器人的集群算法以前是根据集群任务开发的通用程序。尽管集群成员在集群中的作用是相似的,但根据集群的任务设计,它们可能有所不同。在集群系统中,为了尽量减少对集群通信系统的需求,一般要求集群根据集群成员的瞬时状态自主决定,而不接受系统的指令(Alemdar,2021)。
团结
群体类群落和集群智能优先考虑其基本行为的情况之一是群体的生存。出于这个原因,群体的每个成员都应该向外界做出基本反应,以声援他们的群体。在这里,单个成员的生存并不重要,重要的是群体本身的生存。团结中的另一个问题是,群体在完成相关任务后立即开始另一项任务,这是循环的(Alemdar,2021)。
弹性
尽管 "灵活性 "的概念,即群体在相关情况发生后的快速恢复,在英文文献中被称为 "Resiliency",但在集群系统中的使用却没有确切的对应。在群体可能发生的任何灾难中,群体对当前损失的认识和快速的改善解释了集群系统中的这个概念。无论牧群成员的损失有多大,牧群智能应该分析这种情况,而在其他牧群成员或牧群内做出新的角色分配。它还应该迅速适应这种新情况(Alemdar,2021)。
蜂群无人机:蜜蜂机器人状态
蜂群无人机,是对自然界蜂群系统之间的行为的机器人复制;它由大量的无人机组成,在蜂群内以协调的方式执行任务,与操作者或蜂群内的决策机制一起执行任务(After等人,2016)
蜂群无人机的传感器可以是相同的,也可以是不同的,这取决于任务、自主性水平和平台类型。在这种情况下,我们可以将我们在蜂群系统中使用的同质和异质分类用于蜂群无人机。尽管同质蜂群无人机系统的系统复杂程度较低,但与异质系统相比,传感器类型、信息处理能力或根据任务的灵活性能力受到更多限制。在异质蜂群无人机系统中,无人机任务能力的多样性和蜂群成员分别携带的有效载荷中的高传感器能力对蜂群非常有利,但与同质系统相比,技术复杂性是有利的(Oskoei,2014)。
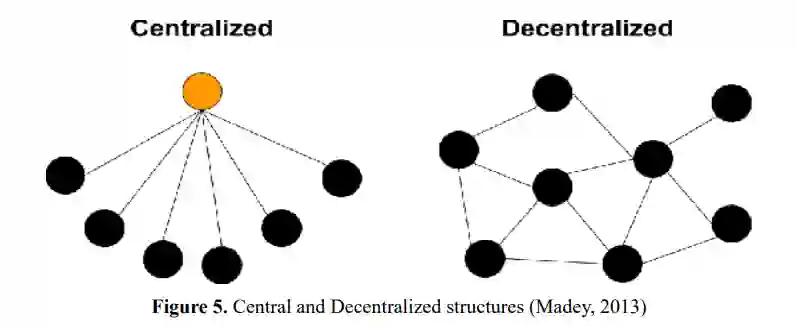
基本上,在蜂群无人机操作中使用了两种控制架构,"集中式 "和 "分散式"。蜂群中的无人机系统的中央控制架构具有较低的自主性和自治性。蜂群中的无人机之间没有相互通信结构。系统的操作员或操作人员通过分别从每个无人机系统中获取信息来提供蜂群的协调。由于这个原因,无人机系统的任务分配是提前进行的。中央控制结构中的低自主性的优点是系统简单,容易优化,但在系统冗余或通信问题的情况下,群的持久性较差。
另一方面,分散式,即分布式控制架构,在无人机系统中,机群需要有较高的自主性和相互通信。具有这种结构的无人机应该能够通过通信来接收和分享信息,以便在它们之间传输传感器数据。它应该能够针对传来的信息做出必要的决定。在这种情况下,操作者在畜群中的作用就转移到了更高的管理水平。
分布式控制架构比集中式架构有更复杂的结构,因为它们需要高水平的自主性。在分布式或分散式控制架构中,由于任务和信息分布在无人机之间,系统更加持久,但由于其灵活性和冗余性,它更加重要。这使得无人机更容易适应动态环境。分散的畜群;通过系统内的合作,它更能抵抗无人机可能发生的损坏。
蜂群系统中的编队部署
蜂群系统的另一个问题是根据位置和任务的不同进行部署。有3种部署方法,即 "静态蜂群"、"动态蜂群 "和 "混合蜂群"。在静态蜂群形成中,蜂群成员是在任务前通过在地面上控制飞行的系统在蜂群成员之间建立通信、信任和合作的信任来选择。在静态蜂群中,从任务开始就阻止参与蜂群,新成员不包括在蜂群中。在动态虫群形成中,新成员被允许在任何时候加入或离开虫群,无论是在任务之前还是之后。来自同一控制机制或集团的新机器人加入群组,被称为封闭-动态群组形成。在开放-动态蜂群编队中,任何第三方机器人都可以被纳入蜂群,并进行相关分配。在动态群组形成中,群组成员之间的安全通信和合作等困难就凸显出来了(Akram等人,2017)。混合羊群形成使静态羊群形成和动态羊群形成作为一个整体一起工作。在这种队形中,有一个具有静态群居行为的群落在群落的中心。中心的静态蜂群允许其他蜂群成员(无人机)加入蜂群。
蜂群无人机系统中的通信与交互
在这一节中,将研究蜂群系统和作为蜂群系统结构的蜂群无人机的内部和外部互动,以及通信方式。畜群成员之间的协调是成功执行畜群系统任务的重要条件之一。从蜂群成员的传感器接收到的信息的传递,以及对这些信息的处理和分配给蜂群成员,对于蜂群通信来说是很重要的。包含在蜂群机器人中的无人机系统由于其快速和非常灵活的运动以及宽广的任务区域,建立了具有无线连接的蜂群互动(Zhu, , 2015)。
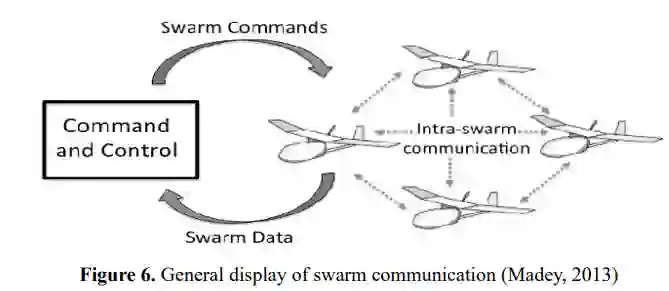
目前的Swarm无人机系统包括一个提供指挥和控制的地面控制系统。在这里,相关数据被传输到地面控制系统,为操作者提供信息,操作者传输的命令被传递给蜂群元素。无人机将位置信息(GPS,如果有的话)、速度和有效载荷的数据作为遥测数据传输给地面控制系统。在这些系统中,接收器和发射器使用未经许可的无线电频率,如900MHz来传输数据(Campion等人,2018)。图6中给出了蜂群通信的一般表示。
当我们观察蜂群内的通信和覆盖区域时,蜂群通信被分为两种:"直接通信 "和 "间接通信"。当蜂群系统来自单一中心并且对各自的任务有有限的覆盖时,就会使用直接通信。在这种通信方式中,它们在蜂群元素和地面控制系统或站之间直接通信,没有基站。用于直接通信的通信模块,如ZigBee,具有低功耗、低延迟通信和低成本。
另一方面,间接通信则提供了牧群中的无人机与地面控制站之间的通信,没有距离限制。在这种通信方式中,在机群和地面控制站之间有固定基站或移动基站,系统之间的通信得到保证。在间接通信中使用了GSM或卫星通信等通信单元,实现了长距离的数据传输。这种情况下,所消耗的功率、用于通信的费用和单元之间的延迟都会随着覆盖区域的增加而成正比。
蜂群无人机内部的数据传输分为三种:广播、查询和同步。STM Thinktech 2019年2月题为《HOT无人机系统》的报告中概述了这种区别: 现代战争的未来预测"。广播;它通过与其他蜂群成员分享,实现了蜂群元素的当前状态。在查询中,蜂群元素发送一个包含其他蜂群元素的相关数据的消息。同步发送一个包含同步请求的消息给蜂群的群主。收到请求的相关蜂群元素将数据广播给其他蜂群元素。
蜂群无人机与战场
无人机系统首先以远程控制的逻辑开始其历史进程。1849年8月22日,奥地利将时间控制的引信炸弹装入200个气球,并将其送往意大利的威尼斯,这是公认的首次将无人机用于军事攻击。"Ruston Proctor Aerial Target",第一个无人驾驶航空器或飞机,设计于1916年。1917年,陀螺仪控制的自动飞机成为美国陆军第一架正式的无人驾驶飞机(Kahveci & Nazlı, 2017)。
自20世纪60年代以来,符合当今无人驾驶飞机定义的现代无人驾驶飞机已经被开发出来。美国开发的瑞安147型无人机,曾在1970年代的越南战争中使用。无人机可以向控制无人机的操作台发送视频和图片,在1991年的海湾战争中首次使用(Ekmekcioğlu & Yıldız, 2018)。土耳其的无人机发展进程始于2004年国防工业部副部长与TAI签署的协议。2009年,Baykar防御公司成功进行了Bayraktar Blok A的首次自动飞行测试,为土耳其国家无人机的发展冒险做出了重大贡献(Aydın,2017)。Bayraktar TB2,于2014年4月29日进行了首次飞行;凭借其武装配置,它在幼发拉底河盾牌行动、橄榄枝行动、爪子行动、克朗行动和和平之春行动(URL-1)中作为武装力量与侦察、情报和监视一起被积极使用。
2018年,在俄罗斯控制的叙利亚西部的赫梅米姆空军基地首次出现了无人机的集群使用。对该基地的攻击是由一个反政府组织进行的。俄罗斯人员发现了13架准备在低空进行攻击的无人机,并用EW & SHORAD系统阻止了它们(URL-2)。2019年9月14日,沙特阿拉伯阿美石油公司位于Abqaiq和Khurais的石油设施遭到了无人机集群攻击。这次攻击是用25架无人机以两波连续的形式进行的。攻击后的分析显示,位于Abqaiq的设施被击中19次。沙特阿拉伯的防空层由法国开发的MIM-104爱国者和Crotale短程防空系统组成,但无法阻止无人机的攻击(Joshi, 2021)。
土耳其武装部队;2020年在伊德利卜省的农村地区以叙利亚武装部队为目标,使用集群式(群)武装无人机。土耳其武装部队成群结队地使用无人机系统,在短时间内摧毁了200多个目标、5架直升机、23辆坦克、23门火炮以及俄制BUK和Pantsir防空系统(Urcosta,2020)。
