
现代战争中创新技术的快速发展,导致在规划攻击无人机打击任务时,必须考虑敌方运用现代反无人机手段构建防御的能力。因此,在规划旨在克服攻击无人机向敌方目标运动障碍的大规模攻击时,研究预防性行动具有现实意义。本出版物侧重于开发分析和仿真模型,以在最小化敌方反无人机行动所带来的风险的同时,规划攻击。本研究的目标是开发一套数学和仿真模型,用于在敌方主动对抗措施下规划攻击无人机群的移动。需要解决的任务如下:系统分析在战场动态变化条件下规划攻击任务的行动;从一组相关敌方目标中选择一个子集进行攻击;在能力有限的条件下,创建所需数量的攻击无人机用于攻击;为攻击无人机制造迷惑性轨迹以成功击中敌方目标;开发一种算法,用于形成无人机被击落(损失)风险最小的飞行路线;以及创建一个仿真模型,模拟在敌方主动对抗措施下攻击无人机群向目标的移动。所使用的数学方法和模型包括:用于创建实施攻击无人机打击行动的逻辑顺序的系统分析;对可能敌方目标特性的定性和定量评估;用于选择相关敌方目标子集方案的词典排序法;用于计算将参与攻击的攻击无人机数量的整数(布尔)规划;以及在敌方对抗条件下形成攻击无人机移动的基于智能体的仿真建模。获得的结果如下:提出了在战场情况动态变化条件下规划攻击无人机打击任务的系统化表示;论证了用于大规模攻击的相关目标子集的选择;在能力有限的条件下计算出了所需的攻击无人机数量;开发了一种为攻击无人机制造飞行风险最小路线的算法;并创建了一个基于智能体的模型,用于模拟攻击无人机群在各种主动对抗者对抗场景下的飞行。结论:本研究结果为制定在敌方主动对抗条件下攻击无人机群的打击任务计划提供了科学依据,从而促进了空地作战行动的整合,并使计划的军事行动得以成功执行。所提出方法的新颖之处在于,在敌方主动对抗和动态战场条件下,使用攻击无人机进行攻击任务计划的科学论证,并得到一套原创的分析和仿真模型的支持。
关键词:攻击无人机群;打击任务;当前敌方目标;无人机移动风险最小化;攻击无人机数量优化;基于仿真的攻击无人机移动多智能体建模。
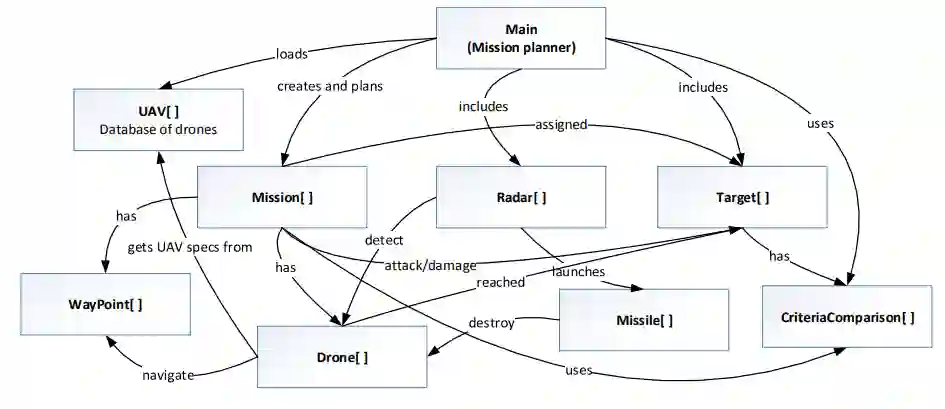
图1 基于智能体的无人机任务规划模型体系结构

