
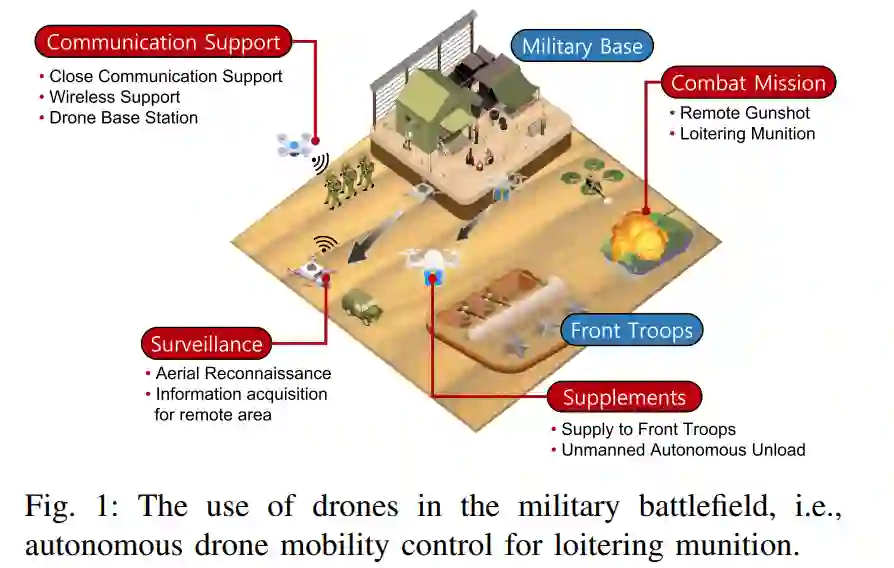
根据无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。在本文中,一种新颖的基于DRL的自主非线性无人机机动性控制算法在网络物理游荡弹药中的应用。在战场上,基于DRL的自主控制算法的设计并不直接,因为现实世界的数据收集一般是不可用的。因此,本文的方法是:用Unity环境构建网络物理虚拟环境。基于虚拟的网络物理战场场景,可以设计、评估和可视化一个基于DRL的自动化非线性无人机移动控制算法。此外,许多障碍物的存在对真实世界战场场景中的线性轨迹控制是有害的。因此,我们提出的自主非线性无人机移动控制算法利用了形势感知组件,这些组件在Unity虚拟场景中用Raycast函数实现。基于收集到的情况感知信息,无人机可以在飞行过程中自主地、非线性地调整其轨迹。因此,这种方法显然有利于在有障碍物部署的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性移动控制算法。
成为VIP会员查看完整内容
相关内容

Arxiv
29+阅读 · 2021年11月13日
Arxiv
37+阅读 · 2021年5月28日


最新内容
相关VIP内容
相关资讯
相关论文
Arxiv
29+阅读 · 2021年11月13日
Arxiv
37+阅读 · 2021年5月28日