
导读
CVPR 2026 已经不再只是一场讨论识别、检测和分割的计算机视觉会议。根据 LIMIT.Lab 与 cvpaper.challenge 团队整理的 165 页现场报告,今年最明显的变化是:视觉研究正在从“理解图像”转向“理解并生成世界”,再进一步走向行动、交互与持续学习。
这份报告覆盖主会、Workshop、Tutorial、获奖论文和现场讨论。若把大量信息压缩成几条主线,可以看到五个值得持续关注的方向:评价模型成为独立研究对象,机器人走向全栈物理智能,3D/4D 与世界模型加速融合,互联网视频成为可扩展数据源,生成模型则开始重新审视潜空间和像素空间的取舍。
一、CVPR 仍在快速扩张
报告给出的现场数据表明,CVPR 2026 共收到 16,092 篇投稿,相比上一年继续大幅增长;录用率约为 25.3%。注册人数超过 1.2 万,线下参会规模接近 9,000 人。 规模增长带来了两个直接变化。 第一,Workshop 和 Tutorial 的竞争也在加剧。它们不再只是主会之外的补充活动,而是新研究方向形成共同体、建立评价体系和凝聚研究议程的重要入口。 第二,审稿与算力问题越来越突出。论文数量快速增长,评审规模同步扩张;与此同时,大模型实验所需的 GPU、数据和工程资源,也让工业界与学术界之间的资源差距更加明显。 CVPR 2026 还引入了 Findings Track,尝试接纳技术可靠、实验扎实,但创新程度未达到主会标准的工作。这反映出顶会开始正视重复投稿、评审容量和“增量但有价值”的研究成果。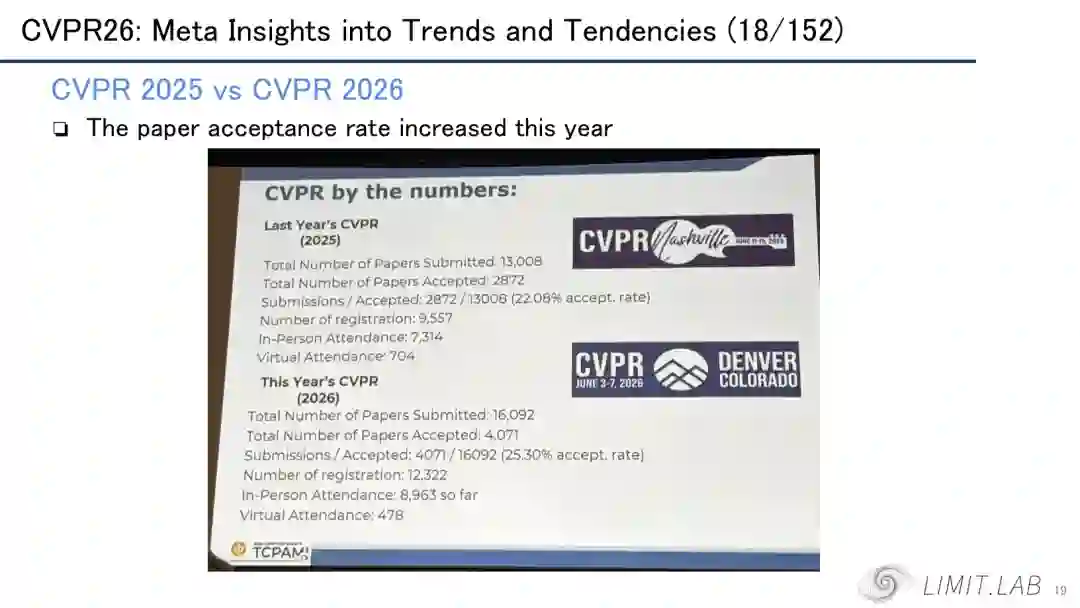
二、评价器成为一等研究对象
生成模型和多模态模型越来越强之后,传统指标开始跟不上模型能力。BLEU、CIDEr、CLIPScore 或单一的图像质量指标,很难完整衡量复杂视频、开放式生成和多模态推理结果。 因此,CVPR 2026 出现了一个鲜明趋势:评价器本身正在从实验末尾的工具,变成需要训练、验证和审计的模型。
VLM-as-Judge、视频奖励模型和生成式奖励模型可以给出更接近人类偏好的评价,但也会引入新的问题:评价模型是否存在位置偏差?是否容易被提示词操纵?是否真正理解物理一致性?不同评价器之间能否复现? 这意味着未来论文不能只报告“模型得分更高”,还需要回答两个问题:分数由谁给出,以及这个裁判是否可信。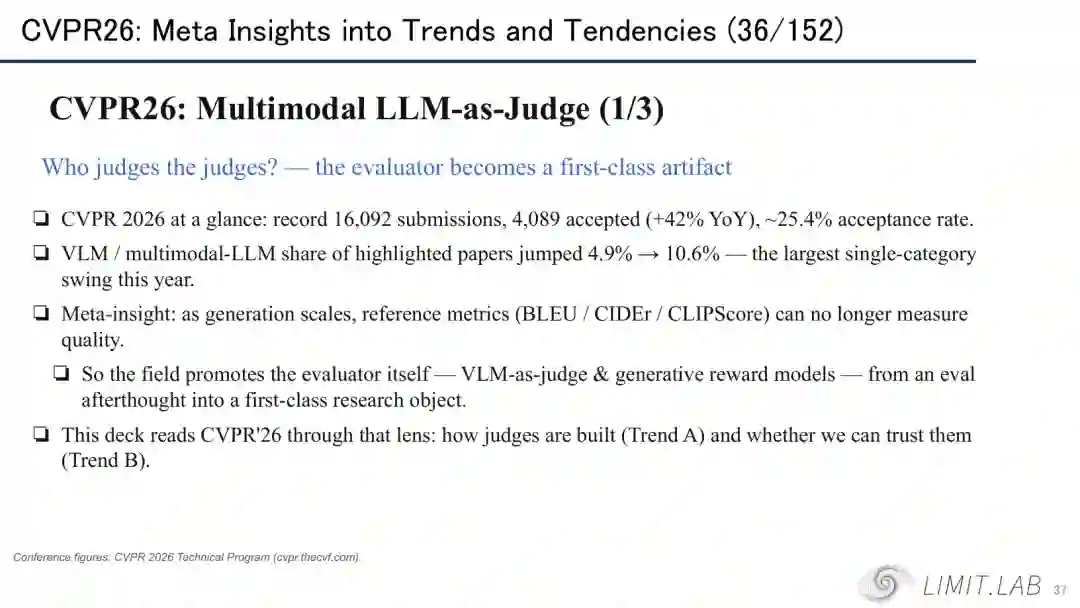
三、机器人研究进入全栈物理智能阶段
报告对多个机器人 Workshop 和 Tutorial 的总结高度一致:机器人学习已经不能只靠扩大 VLA 模型。 一个可用的物理智能系统,需要数据、模型、传感器、仿真器、部署系统和可靠性机制共同扩展。数据既包括遥操作和真实机器人轨迹,也包括人类视频、模拟数据、生成轨迹以及机器人自主探索得到的数据。 模型层面则从 VLA 进一步走向 World-Action Model。模型不仅要根据图像和语言预测动作,还要理解动作将如何改变环境。长时任务还需要层次化规划、记忆、可提示策略和失败恢复机制。 报告特别强调触觉、力反馈和接触丰富操作。对于遮挡、易碎物体和灵巧手操作,仅靠 RGB 图像往往不足。物理智能的下一阶段,很可能不是单纯增加视觉模型参数,而是把多传感器、世界模型和真实部署闭环结合起来。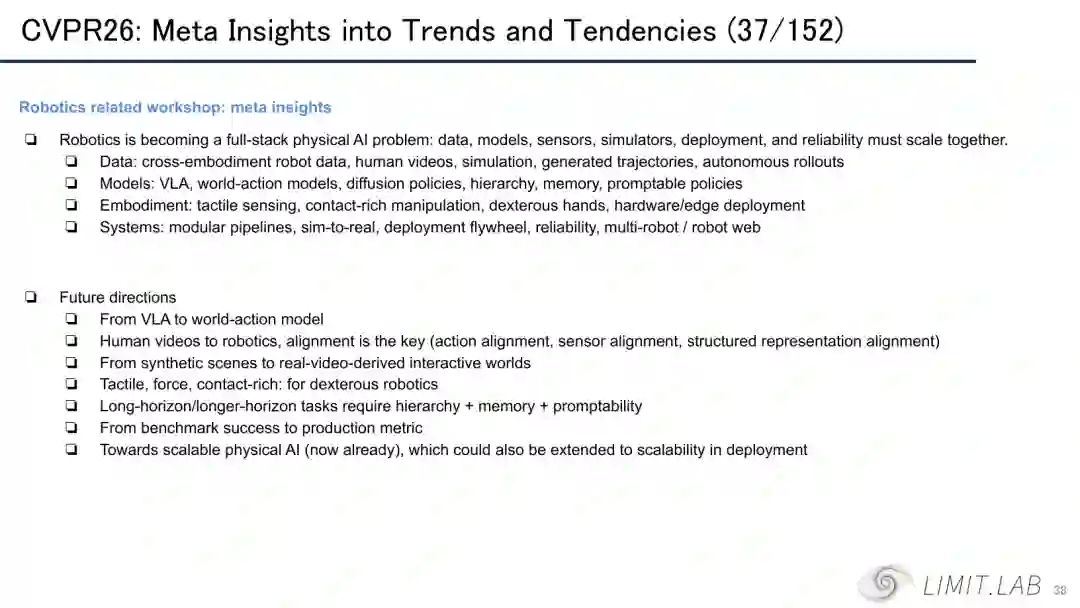
四、Bitter Lesson 之后,视觉研究如何选择抽象层
CVPR 2026 的 Bitter Lessons Workshop 讨论了一个根本问题:当规模化学习不断取得成功,传统计算机视觉中的深度、光流、分割、姿态和显式 3D 表示是否仍然必要? 报告给出的结论并不是“手工结构已经无用”。更准确的说法是:研究应该从最终交付目标倒推表示方式。
如果目标是分类,二维表征可能足够;如果目标是机器人行动、可交互世界、CAD 资产、精确测量或科学发现,几何、物理和中层视觉仍然重要。只是它们的角色可能从固定的系统核心,转变为监督信号、接口、探针或调试工具。 真正长期有效的方向,是建立闭环系统:感知环境、采取行动、收集新数据、验证结果,并在预训练之后继续学习。规模化很重要,但数据质量、物理可证伪性、低资源鲁棒性和可解释性同样不能被省略。
五、3D、4D 与世界模型正在汇合
报告中的获奖候选、Workshop 和专题论文都显示,研究重点正在从静态三维重建走向动态场景建模、世界模拟和物理推理。 一个明显变化是,3D 不再只是独立的几何任务,而是成为生成、视频理解和机器人行动之间的中间语言。4D 方法进一步加入时间维度,要求模型保持对象身份、几何结构和运动的一致性。 但研究界对“是否仍需要显式 3D 数据”并没有统一答案。一种观点认为,大规模视频模型能够从二维序列中隐式学习世界结构;另一种观点认为,若任务涉及精确动作、测量和物理交互,仅靠隐式视频表示仍然不够。 这场争论短期内不会结束。更可能出现的路线,是显式几何与隐式世界模型共存:模型使用海量视频学习通用先验,再通过深度、点云、Gaussian Splatting 或物理约束获得可控制、可验证的空间结构。
六、生成模型开始“回到像素”
潜空间扩散依靠 VAE 压缩图像,大幅降低了训练和采样成本,但压缩过程也可能丢失边界、文字和高频细节。CVPR 2026 出现了一批重新研究像素空间扩散的工作。 这并不是简单回到早期的原始像素建模,而是重新设计表示结构。常见做法包括:
- 将全局语义与局部纹理分开建模;
- 将补丁级结构与像素级细节分开处理;
- 将低频内容与高频信息解耦;
- 使用更轻量的局部模块降低像素空间计算成本。
这条路线尤其适合超分辨率、图像恢复、文本渲染和密集条件生成,因为这些任务非常依赖局部保真度。相应地,评价标准也会从“看起来真实”转向边界保持、条件对齐和细节一致性。
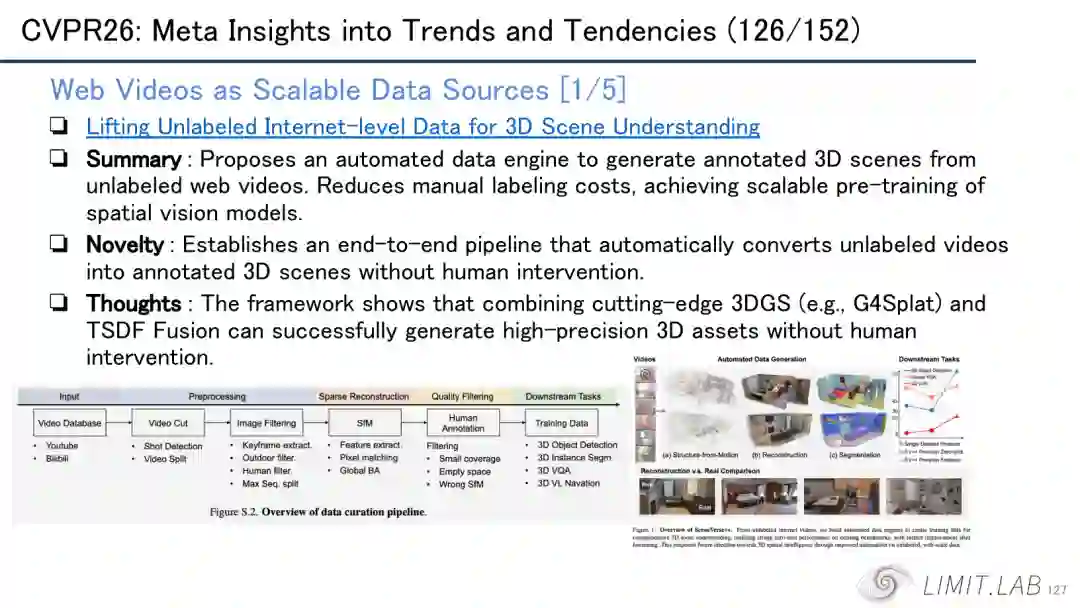
七、互联网视频正在变成通用训练数据
高质量 3D 数据、机器人轨迹和动作标注都非常昂贵,而互联网已经积累了近乎无限的视频。CVPR 2026 的多项工作尝试把这些无标注视频转换为可训练资源。 典型流程是先进行镜头切分和关键帧筛选,再利用现有视觉基础模型恢复深度、相机运动、人体动作或三维结构,经过质量过滤后,生成用于空间理解、自动驾驶和机器人学习的训练数据。 这使互联网视频的角色发生变化:它不再只是二维预训练语料,而是潜在的 3D 场景库、动作库和交互经验库。 不过,视频到行动之间仍存在关键鸿沟。人类动作与机器人动作具有不同的身体结构、传感器和控制空间。因此,未来竞争重点不只是“谁拥有更多视频”,而是谁能更可靠地完成动作对齐、传感器对齐和结构化表示对齐。
八、给研究者的五点启示
第一,评价协议与模型同等重要。 在开放式生成和多模态任务中,可靠、可解释、可复现的评价体系本身就是研究贡献。 第二,机器人不能只追求端到端规模。 数据采集、记忆、触觉、仿真、部署和反馈闭环,将决定模型能否从演示走向真实环境。 第三,3D 与 4D 不会消失,但形态会改变。 它们将更多作为世界模型的结构约束、交互接口和验证工具存在。 第四,视频是下一代规模化数据源。 关键挑战从“有没有数据”转向“如何自动提炼可靠的空间与动作监督”。 第五,效率重新成为核心变量。 像素空间生成、轻量 VLA、边缘视觉和计算报告计划都说明,算力成本与部署效率正在进入主要评价维度。
结语
从这份报告看,CVPR 2026 最值得记住的关键词不是某一个模型,而是闭环:评价模型要接受审计,生成模型要尊重结构,世界模型要连接行动,机器人要在部署中继续收集数据和学习。 计算机视觉的边界也因此继续外扩。从识别图像,到生成视频,再到模拟世界并在其中行动,视觉正在成为通向物理智能的重要基础设施。
