自主系统的优势在过去十年间已引起业界的广泛关注。各类自主系统已被应用于交通运输、农业、医疗保健等多个领域。以往无法单独由人类完成或高风险的任务,如今可由自主系统高效处理,劳动力成本也因此大幅降低。在自主系统可执行的各类任务中,其对周围环境的理解能力至关重要。无论是使用无人航空系统进行包裹配送,还是自动驾驶车辆,都要求自主系统在不同场景下运行时具有更高的鲁棒性。本研究旨在提升自主系统在复杂及无GPS环境下的鲁棒性。
在探索未知环境时,若全球定位系统信号等外部信息不可用,地图构建与定位同等重要且互为补充。因此,同时创建地图并进行自身定位至关重要。在此背景下,机器人学界提出了同步定位与地图构建技术,旨在为自主系统提供为其周围环境构建地图并在运行过程中实现自我定位的能力。过去几十年来,针对不同类型的传感器和应用场景,已设计了多种SLAM架构。在不同类别的SLAM中,以相机作为传感器的视觉SLAM表现尤为突出。其优势在于能从图像中提取丰富信息,而其他单一传感器难以企及。由于相机捕获的图像被作为输入,因此结果的精度在很大程度上取决于图像质量。大多数SLAM架构能够轻松处理高质量图像或视频流,但对于低质量图像的处理仍具挑战性。视觉SLAM面临的第一个挑战性场景是运动模糊场景,其性能在此类场景下会严重下降。视觉SLAM面临的另一个挑战性场景是低光照环境。由于照明条件不佳导致相机获取的信息减少,这也降低了视觉SLAM系统的精度。此外,由于操作需要实时进行,视觉SLAM对计算效率提出了额外要求。
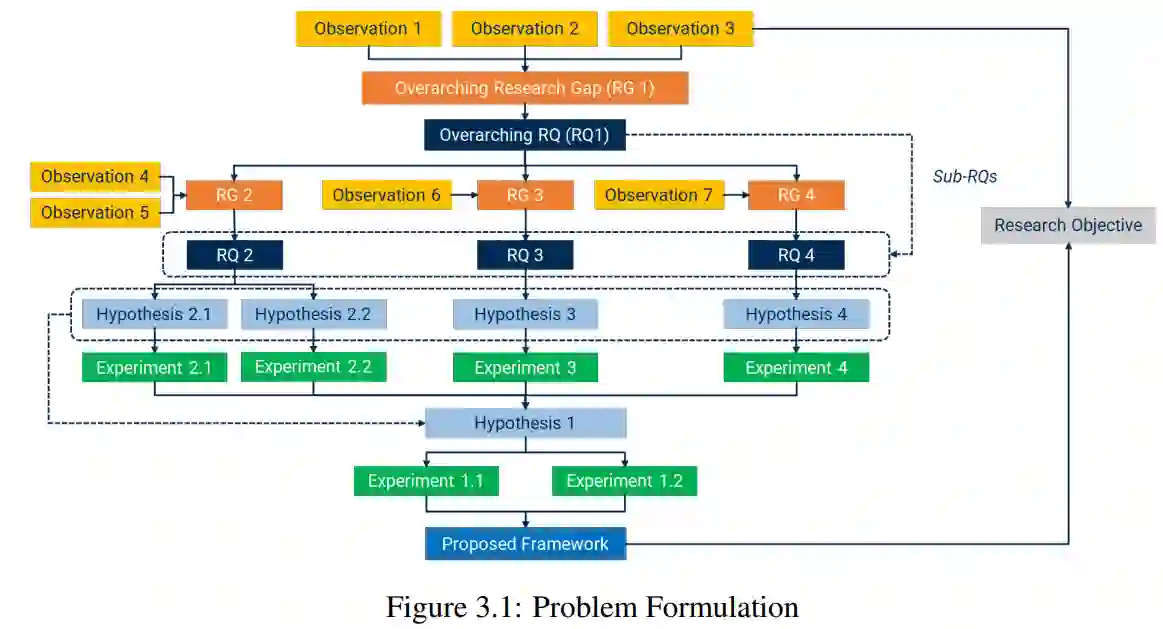
基于上述观察,本论文形成了如下研究目标:改进视觉SLAM在上述两种挑战性条件下的性能。为实现这一总体研究目标,本论文确定了三个研究方向。第一个研究方向侧重于开发实时恢复在这些挑战性场景下捕获的低质量图像的能力。本论文开发并评估了两种高效深度学习模型:单图像去模糊模型和低光照图像增强模型。第二个研究方向侧重于对视觉SLAM系统生成结果进行不确定性量化。由于部分视觉SLAM系统存在非确定性行为,本论文开发了一种统计方法来减少和分解结果中的不确定性,并提供了一种性能评估的量化方法。第三个研究方向侧重于创建可用于测试运动模糊场景下性能的视觉SLAM验证数据集,因为现有数据集大多模糊度不足或仅限于室内环境。本论文借助基于物理的虚拟仿真环境,创建了一个合成的模糊SLAM数据集。综合这三个研究方向,提出了一种视觉SLAM框架,并利用在两种挑战性场景下捕获的多个视觉SLAM数据集进行了测试。实验结果表明,与基准视觉SLAM系统相比,通过统计方法观察到所提出的视觉SLAM框架在所有用例中均显示出精度提升。因此,添加了图像增强模块的视觉SLAM框架确实提高了在挑战性条件下的视觉SLAM性能。
通过本研究工作,取得了两项关键贡献:
- 一个专为应对现实世界挑战性条件(如运动模糊和低光照环境)而设计的视觉SLAM框架。
- 一种利用基于物理的仿真环境生成逼真合成模糊视觉SLAM数据集的新流程。