
无需浮出水面即能执行水下与濒海区域监视任务的能力,将提升潜艇的安全性及其作战能力。为降低潜艇暴露风险,本文提出一种创新的双模无人潜空系统及其作战概念。该双模无人潜空系统首先从水下潜艇释放,并在水下航行以与潜艇保持距离。随后,它将利用一种创新的推进系统出水,实现从水介质到空气介质的转换,目的在于执行预定的空中任务。空中任务完成后,双模无人潜空系统将重新潜入水中并巡航返回潜艇以待回收。
本研究旨在设计与开发能够实现所提作战概念的系统。项目着力于三个关键方面,即:i) 研究兼顾空气动力与水动力性能的优化构型;ii) 探索水/空介质间的有效转换;iii) 设计水/空混合推进系统。为实现在水与空气中的高效运行,研究考虑采用一种带有新型机翼展开机构的变后掠翼构型。通过数值模拟、水洞与风洞实验测试,评估了推进单元在水中的性能特性及其在空气中的空气动力特性。评估数据支持了双模航行器构型的可行性,稳定性分析表明该航行器在飞行中具有静稳定与动稳定特性。喷水推进转换系统由加压二氧化碳驱动,旨在实现从水到空的快速起飞转换。初步设计涵盖了采用经高保真数值模拟方法校准的解析模型进行的系统尺寸设计,以及推进单元中采用的特殊气体释放机制的设计。通过推力和发射实验验证了该转换推进系统的设计结果与适用性。定制化紧凑型混合推进系统的空中与水中实验结果证实了其能为飞行和水下巡航提供充足动力。
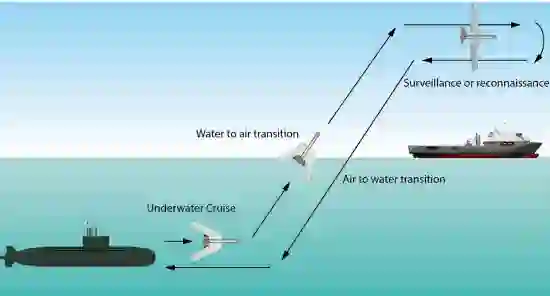
图1-1:任务剖面图
随着现代水下跟踪技术的持续发展,潜艇即使在潜航作业中也面临易于暴露的风险。为降低潜艇的暴露风险,本文提出一种创新的双模无人潜空系统及其作战概念。如图1-1的任务剖面图所示,潜艇配备有一部双模无人潜空系统。当需要执行监视、侦察或目标指示任务时,双模无人潜空系统从水下潜艇释放,在水下巡航足够距离而不暴露潜艇位置。随后它将上浮至近水面,利用喷水推进系统起飞离水,并重构为飞行状态以类似其他无人航空器的方式执行任务。飞行任务结束后,该航行器重构为水下作业模式,下潜并水下航行以被潜艇回收。若水-空与空-水转换发生在远离潜艇的位置,双模无人潜空系统将不会暴露潜艇的位置,从而保持其隐身性能。此外,该航行器可通过延长水下隐蔽时间降低自身被探测的风险,从而提高任务效能。换言之,双模无人潜空系统兼具小型无人航空器的快速机动能力与自主水下航行器的优异隐身性能。
鉴于其执行空中监视与水下数据采集的能力,双模无人潜空系统在民用市场亦具有显著潜力。这些特点提升了其在搜索救援、自然资源勘测等领域的应用价值。例如,当海洋发生石油泄漏时,此类航行器可对有毒污染物扩散范围进行绘图。由于该航行器能在空中快速移动并从水中采集样本,此能力使得搜索救援行动更高效。此外,该工具亦可用于海洋学研究中的样本采集与观测。据作者所知,目前尚无其他航行器能在单次任务中实现此类操作。需要提及的是,迄今为止美国和欧洲也提出了其他双模无人潜空系统概念,但它们大多处于设计阶段和/或子系统技术开发初期。本双模无人潜空系统的新颖之处在于,它集成了空中与海洋航行器的构型及推进系统等特征,以实现其在空气与水中均能高效运行的功能。基于该领域以往的研究和经验,本研究提出了一种原创概念。双模无人潜空系统的开发与测试将填补解决关键设计方面所需的知识空白,并应对本章后续提出的科学研究问题。整个研究过程中获得的数据和经验,有望为推进所提概念向更高的技术成熟度水平发展提供助力。
