战术任务规划在军事领域至少涉及三个阶段:规划、移动与战斗机动。在移动阶段,军事单位试图在未被察觉的情况下从其当前位置移动至更接近其目标的位置。在移动前,军事指挥官通过进行地形与敌情分析来准备,以识别可隐蔽移动的地形和植被变化。关于敌人位置的不确定性,使得军事规划者面临的路径选择挑战更加复杂。为着手解决此问题,引入一种鲁棒优化模型,该模型能够找出一条单独的规避方(其位置不确定)可以采取、同时最小化被单独搜寻方发现的概率的路径。首先构建一个移动网络,然后在引入不确定性之前给出一个标称模型。比较标称模型与鲁棒模型的结果。最后,在讨论影响与应用之前,介绍了对模型的改进,以实现可扩展性和更快的求解时间。
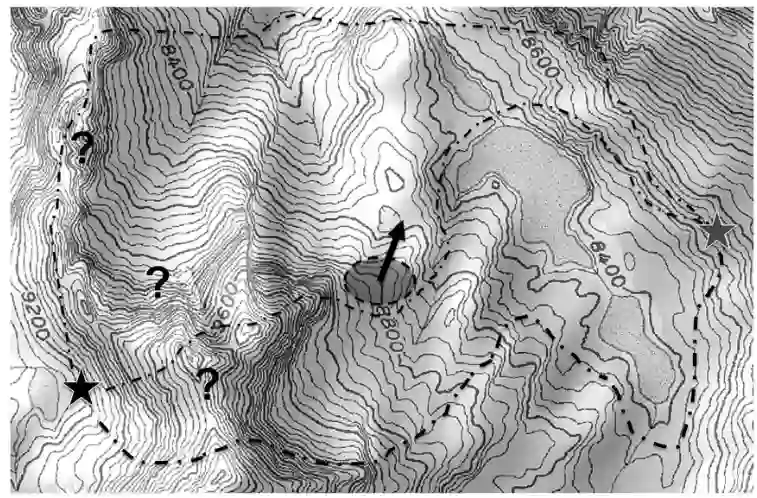
在面对敌情配置不确定的情况下,哪条路径距离最短且被发现概率最低?这个问题经常出现在战术层面的军事规划者面前。为解决此问题,规划者必须对敌方的能力、意图和规模进行估算。此外,规划者必须考虑环境因素,如起伏地形、植被、天气、水域障碍和光照条件。规划者必须选择一条能够最小化被敌人视觉或听觉发现风险的路径(见图1)。目标是开发一个至少能为规划者生成备选方案的程序。
在大多数对抗情况下,路径应最大限度地降低被敌人发现的概率,直至最后一刻。避免被发现具有诸多益处,包括:(1)保持突然性要素;(2)增加获胜机会;(3)在己方部队仍在进入阵地(未准备好接敌)时降低伤亡率(美国陆军部总部,2014, 2019)。转换视角,如果从防御方的角度思考此问题,防御方指挥官通过了解对手可能采取的、围绕其阵地的最危险路径也能获益。
可以应用优化方法来生成最优路径。对于进攻性军事力量,可以生成一条最小化被发现概率的路径。对于防御性军事力量,了解敌方可能采取的、被发现概率最小的路径,能使防御方指挥官决定在何处设置观察点。在任何一种情况下,都力求在仅使用地形数据及不确定的敌方或目标位置信息的同时,优化被发现的概率并最小化行进时间。
先前的路径优化工作主要集中于无人机路径选择。其中一项无人机路径选择研究在三维节点网络上进行了优化。Oh等人探讨了与道路网络绑定的车辆护卫队的最优地面路径。在仿真领域,相关工作纳入了地形数据、天气数据和时问约束以生成视线分析和潜在隐蔽路径,但未考虑敌方位置。类似的仿真工作在考虑避免威胁区域和障碍物时使用了不同的寻路算法,但也未直接考虑敌方位置。最后,Moore等人在一个小型数字"捉迷藏"环境中为数字搜寻方开发了一种自适应控制器。
主要贡献在于:纳入了不确定的敌方位置、为地面部队寻找越野路径,并在利用三维节点网络实现上述目标时将行进路径限制在地形范围内。