
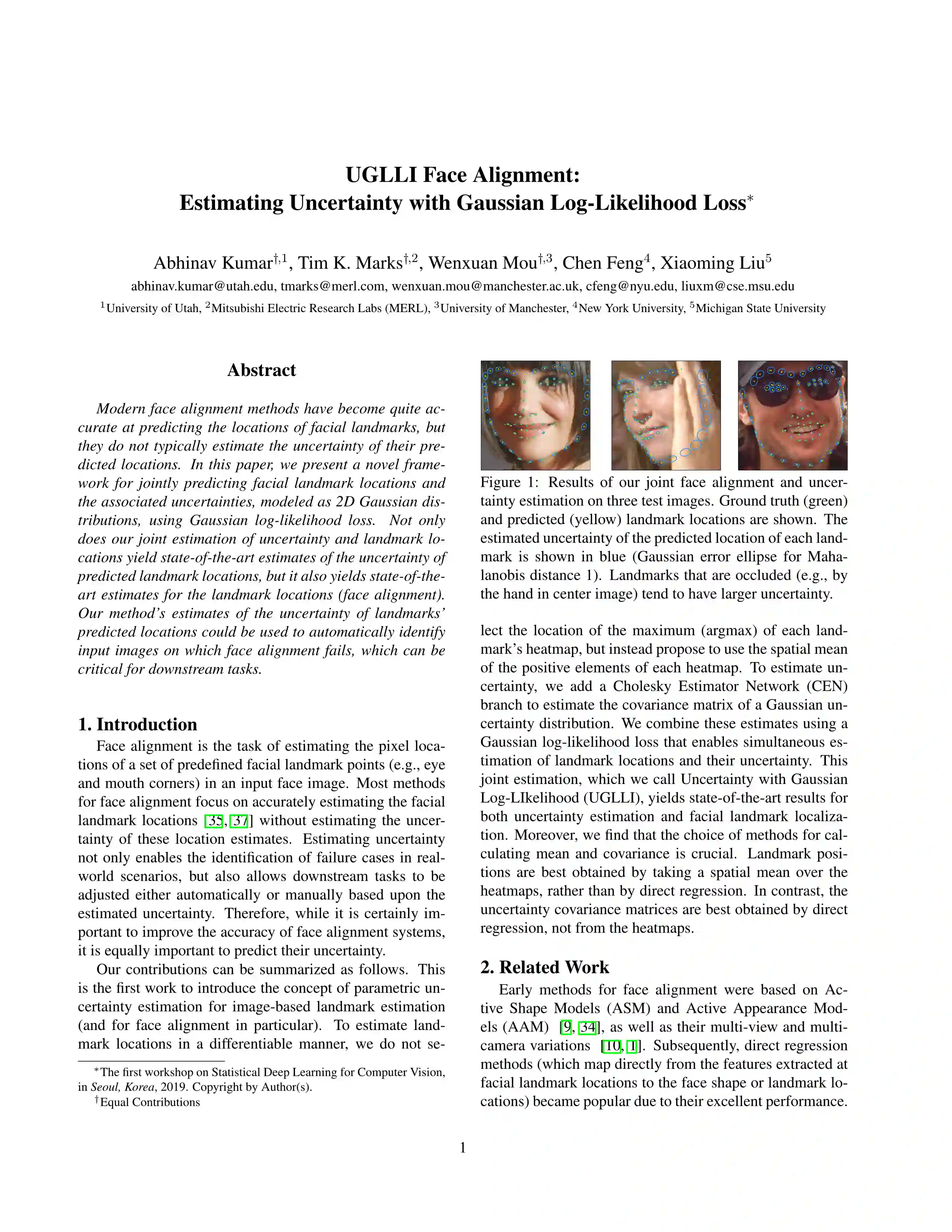
报告主题:UGLLI Face Alignment: Estimating Uncertainty with Gaussian Log-Likelihood Loss
报告摘要:现代人脸对齐方法在预测人脸界标的位置方面已经非常准确,但通常不会估算其预测位置的不确定性。 我们提出了一个新颖的框架,用于使用高斯对数似然损失将脸部界标位置和相关的不确定性建模为二维高斯分布。 我们对不确定性和地标位置的联合估计不仅可以得出对预测的地标位置的不确定性的最新估计,而且可以对地标位置(面部对齐)产生最新的估计。 我们对地标预测位置不确定性的方法估计可用于自动识别面部对齐失败的输入图像,这对下游任务可能至关重要。
成为VIP会员查看完整内容
相关内容

专知会员服务
54+阅读 · 2020年3月5日
专知会员服务
41+阅读 · 2019年12月27日
专知会员服务
38+阅读 · 2019年12月26日
专知会员服务
46+阅读 · 2019年12月25日
专知会员服务
13+阅读 · 2019年10月31日



最新内容
相关VIP内容
专知会员服务
54+阅读 · 2020年3月5日
专知会员服务
41+阅读 · 2019年12月27日
专知会员服务
38+阅读 · 2019年12月26日
专知会员服务
46+阅读 · 2019年12月25日
专知会员服务
13+阅读 · 2019年10月31日
相关资讯
相关论文