
军事规划行动面临高度动态的环境与各类复杂的优化挑战。为在此过程中支持决策者,需要能够自动生成适用于任务规划某些方面的创新性概念。此类工具可简化规划流程、降低风险并减少运行成本。本文提出一个基于仿真的优化框架,旨在解决空中作战规划背景下的三个问题:任务分配、调度与航线规划。这些问题通过基于贪婪算法或遗传算法的互联启发式方法进行处理。此外,采用分层任务网络,以战术条令的形式将领域知识融入解决方案。仿真结果证实了所提方法在中小规模场景下的可行性。然而,关于评估函数和仿真环境仍需进一步研究。
精心策划的任务是成功实施军事行动的关键。然而,此类任务的规划过程极为复杂,因为必须在时间和空间上精心协调由多种不同能力载具组成的大型编队。例如,攻击机在接近目标时需要与防空压制战斗机同步,以最小化附带损伤风险。考虑到这些不同类型的飞机可能从不同地点起飞、以不同速度和高度飞行、或具有不同的探测范围,一次简单的打击任务就变成一个高度动态且复杂的优化问题(Zhang et al. 2020)。此外,无人机(UAV)等现代技术通过在人员介入危险的区域执行任务,增加了战术多样性。
尽管任务规划是一个耗时、复杂且决策空间庞大的过程,但目前这通常仍是保留给人类操作员的决策任务(Quttineh and Larsson 2015)。然而,利用自动化解决方案辅助决策者,可以简化并加速规划流程,甚至可能计算出更有效、风险更低且成本更低的任务计划。
一个自动化规划系统需要支持诸如用于攻击的资产数量与类型、每架载具携带的载荷类型、突破敌方阵地的位置、各小队执行的攻击策略、攻击序列或每架飞机的飞行航线等决策。这些组件高度互联,使得整个协调计划成为一个庞大的耦合优化问题。尽管解决此类复杂任务规划子问题的技术广受关注,但仅有少数研究创建了能够同时为任务规划的多个方面提供解决方案的组合系统(有关相关工作的更多细节,请读者参阅第2节)。这种耦合方法可能会发现不同组件之间模糊的因果关系,从而找到全局最优解,而非专注于局部最优答案。如Bellingham等人(2003)所指出的,孤立地做出决策本已是一项艰巨任务,而在试图为相互关联的问题寻找最优解时,其复杂性将进一步增加。
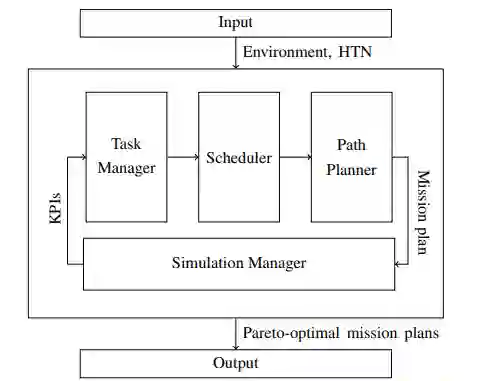
本文旨在提出一个便于创建军事任务计划的框架。该方法可生成一个联合解决方案,涉及针对每个敌方阵地采取何种攻击策略(任务分配)、将哪些资产分组以执行每种攻击策略及攻击顺序(调度),以及在给定环境中飞行何种轨迹最佳(航线规划)。基于贪婪算法或遗传算法的互联启发式方法被用于在降低损伤风险和行动成本方面寻找这些问题的最优答案。此外,决策过程中还融入了以分层任务网络(HTN)形式存在的领域知识。
本文其余部分结构如下。第2节介绍相关工作。第3节给出形式化问题描述。第4节介绍所提方法及其组成部分。第5节讨论实验设置与仿真结果。第6节总结我们的结论与未来工作方向。
