
多智能体系统与蜂群控制已成为近年来先进控制研究中最活跃的领域之一。该领域涵盖广泛的数学与学科范畴,其应用遍及军用与民用领域,从网络分析、储能系统到搜索救援均有所涉及。数学、工程学与计算机科学等学科均对多智能体系统与蜂群控制研究有所贡献,并从中受益。本研究提出了一种新型多智能体系统控制策略,旨在最小化基于载具的协同多智能体系统中的通信需求,同时综述了当代多智能体与蜂群控制的数学基础,以及VC-MAS的基本算法。
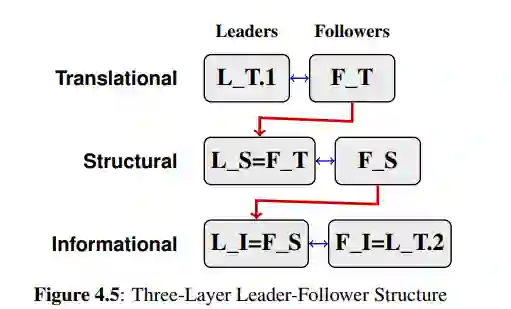
在综述基础上,本文列举了文献中的若干代表性模型,既包括多智能体与蜂群控制的常用方法,也涵盖研究中新颖而富有启发性的路径。首先是称为“关系不变持久编队控制”的技术,它能动态生成刚性编队结构。其次是分布式包容控制,一种特殊的领导者-跟随者策略。第三是对领导者-跟随者策略中多层拓扑的简要介绍。最后是对事件触发协议的概要阐述。
最终,本文提出了一种基于混合方法的新型算法,旨在降低网络计算复杂度。该算法受文献中多项已验证条件的启发,这些条件可降低多智能体/蜂群网络的计算复杂度并确保行为一致性。同时,本文提出了一种通过分离系统任务管理与行为动力学来设计多智能体/蜂群控制的方法,并通过算法仿真验证了模型的有效性。
成为VIP会员查看完整内容
相关内容

Arxiv
39+阅读 · 2023年12月2日
Arxiv
19+阅读 · 2023年5月17日

最新内容
相关VIP内容
相关资讯