
无人驾驶航空器(UAV)已从局部应用场景拓展至涵盖民事、商业及国防领域的复杂远程任务。这一扩展的核心在于超视距(BVLOS)作业能力,该模式完全依赖强韧的指挥控制(C2)数据链路。本述评梳理了无人机通信系统的架构演进历程,追踪了从传统视距链路向现代空天地一体化网络(SAGIN)及6G非地面网络(NTN)的转型。尽管低地球轨道(LEO)卫星星座解决了地面基础设施的覆盖局限,但也引入了严峻的物理层瓶颈:动态传播时延与切换引发的随机抖动。本文评估了该领域如何从基础连通性验证转向时延敏感控制系统,重点阐述了能够动态协调网络波动与载具安全裕度的多层化、风险感知型自主安全架构。
无人驾驶航空系统(UAS)在物流运输、偏远基础设施监测及灾害应急等领域的大规模部署,与超视距(BVLOS)作业的持续拓展密切相关。在现代监管框架下——如欧洲航空安全局(EASA)《特定运行风险评估》(SORA)2.5版方法论[1]及美国国家航空航天局(NASA)《无人驾驶航空系统交通管理》(UTM)指南[2]——具备故障仍可运行特性的高可用指挥控制(C2)链路已成为空域融合的强制性先决条件。当在偏远地区、海域或地形复杂区域作业时,传统地面视距无线电频率及蜂窝网络基础设施(LTE/5G)常受限于几何阴影效应、路径损耗及基站稀缺。因此,卫星通信(SATCOM)已成为实现全球超视距互联的关键赋能技术,尤其在偏远、海洋及基础设施匮乏环境中。然而,将卫星通信集成至高动态、安全关键型系统中,亟需深入理解网络行为特性。航空航天界面临一项严峻权衡:需在广域卫星覆盖优势与网络时延、数据包传输波动导致的控制回路性能劣化之间寻求平衡。本述评梳理了无人机数据链路的历史演进轨迹,将卫星通信置于新兴6G多层网络背景下进行解析,并着重强调了缓解通信诱发运行风险的算法安全框架。与传统侧重连通性性能的卫星通信综述不同,本述评聚焦于新兴的“通信—控制—安全”连续统,其中网络行为直接决定超视距作业的自主性水平、运行风险及适航认证路径。
无人机数据链路的演进轨迹
无人机飞行控制架构从本地点对点系统向高度自主的卫星路由框架转型,可划分为五个鲜明的代际发展阶段,如图1所示。
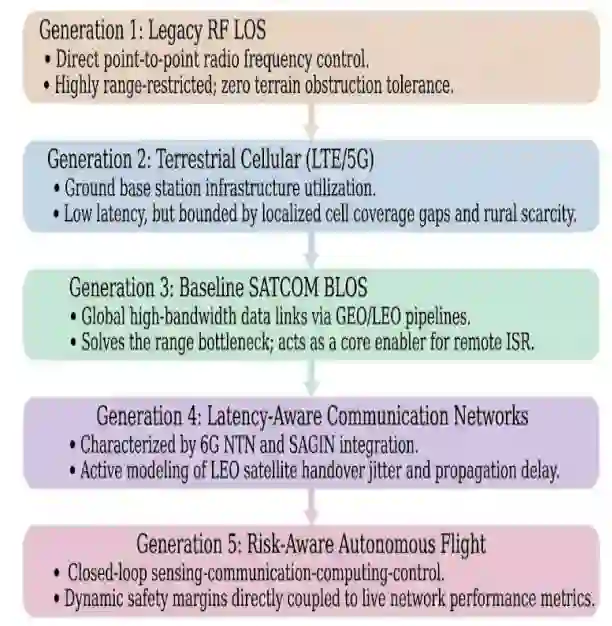
图1. 无人机指挥控制(C2)通信架构的演进代际。
早期研究主要聚焦于建立超视距(BLOS)飞行的基础链路验证。奠基性评估表明,紧凑型机载卫星通信终端能够成功承载情报、监视与侦察(ISR)应用、载荷物流及广域流量监测所需的高带宽实时数据流[3]。此类初期配置虽规避了局部地理障碍,但也证实未来空中网络需从单纯连通性验证转向应对信号延迟与控制回路同步的核心挑战[3]。为在保障安全的前提下超越基础连通性,现代无人驾驶航空系统设计需遵循多层技术演进路径。该路径将原始物理基础设施与闭环自主风险缓释直接关联,其概念框架如图2所示。
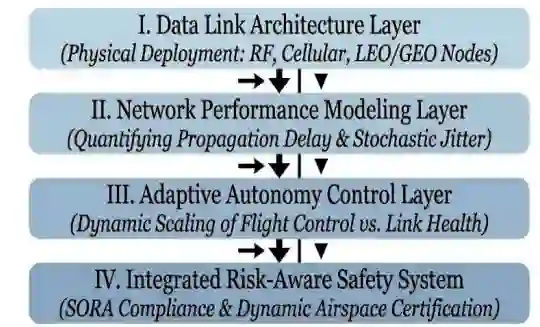
图2. 安全合规的超视距飞行作业所需的通用系统化演进层级。

