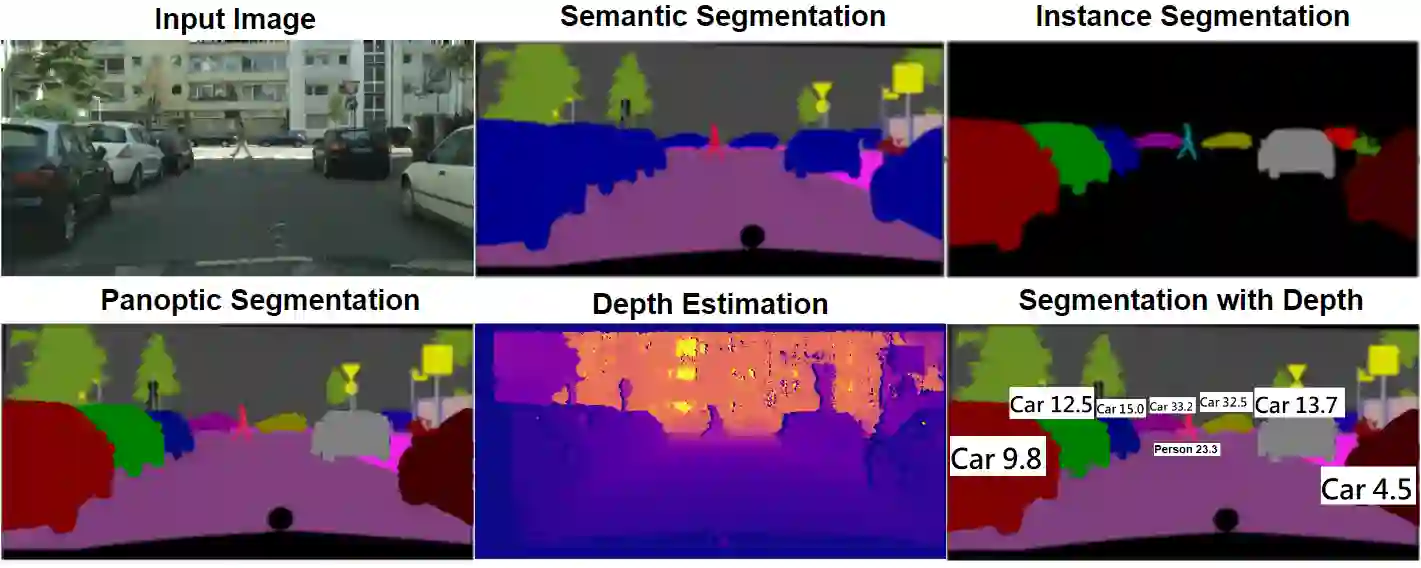
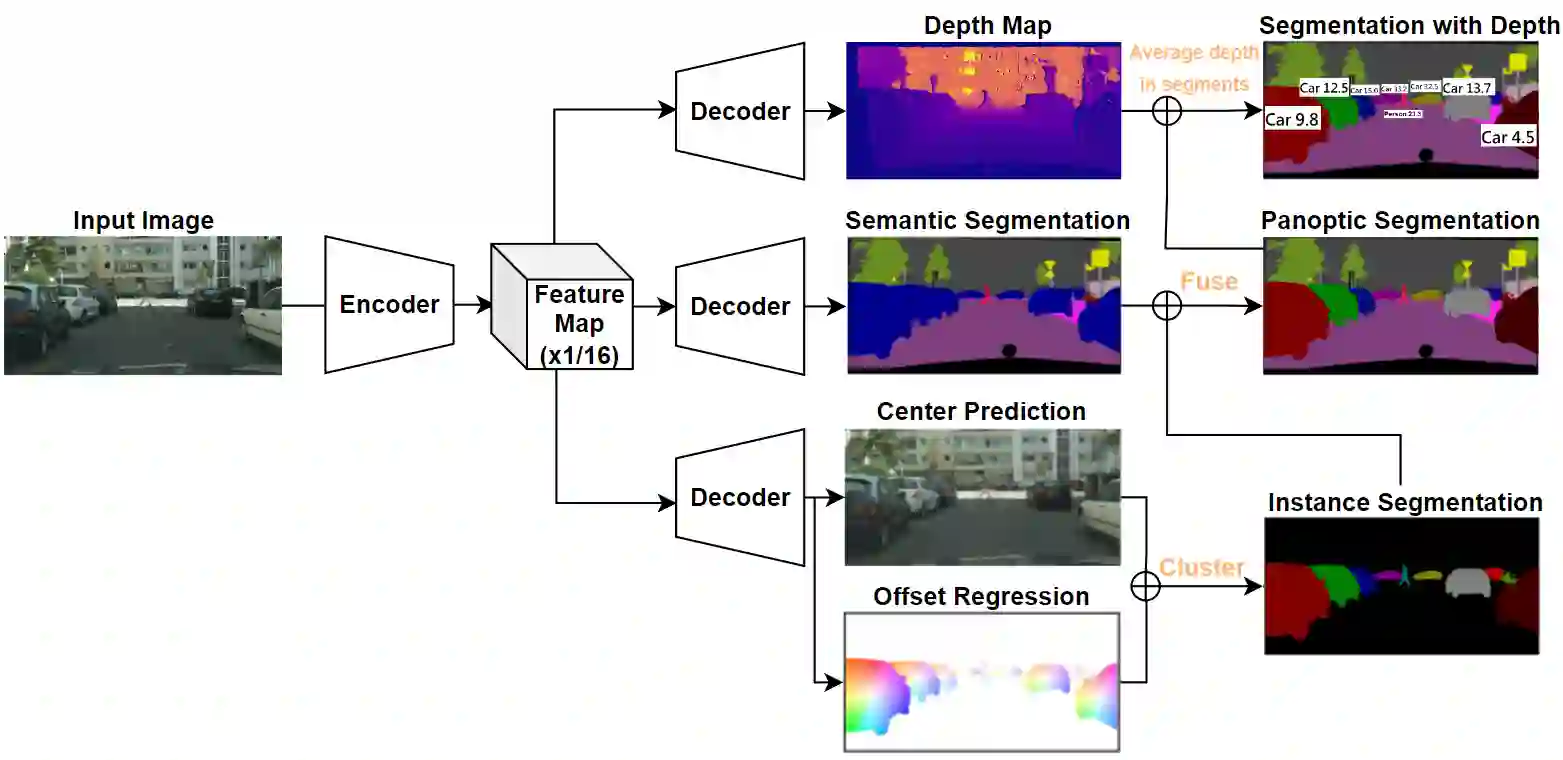
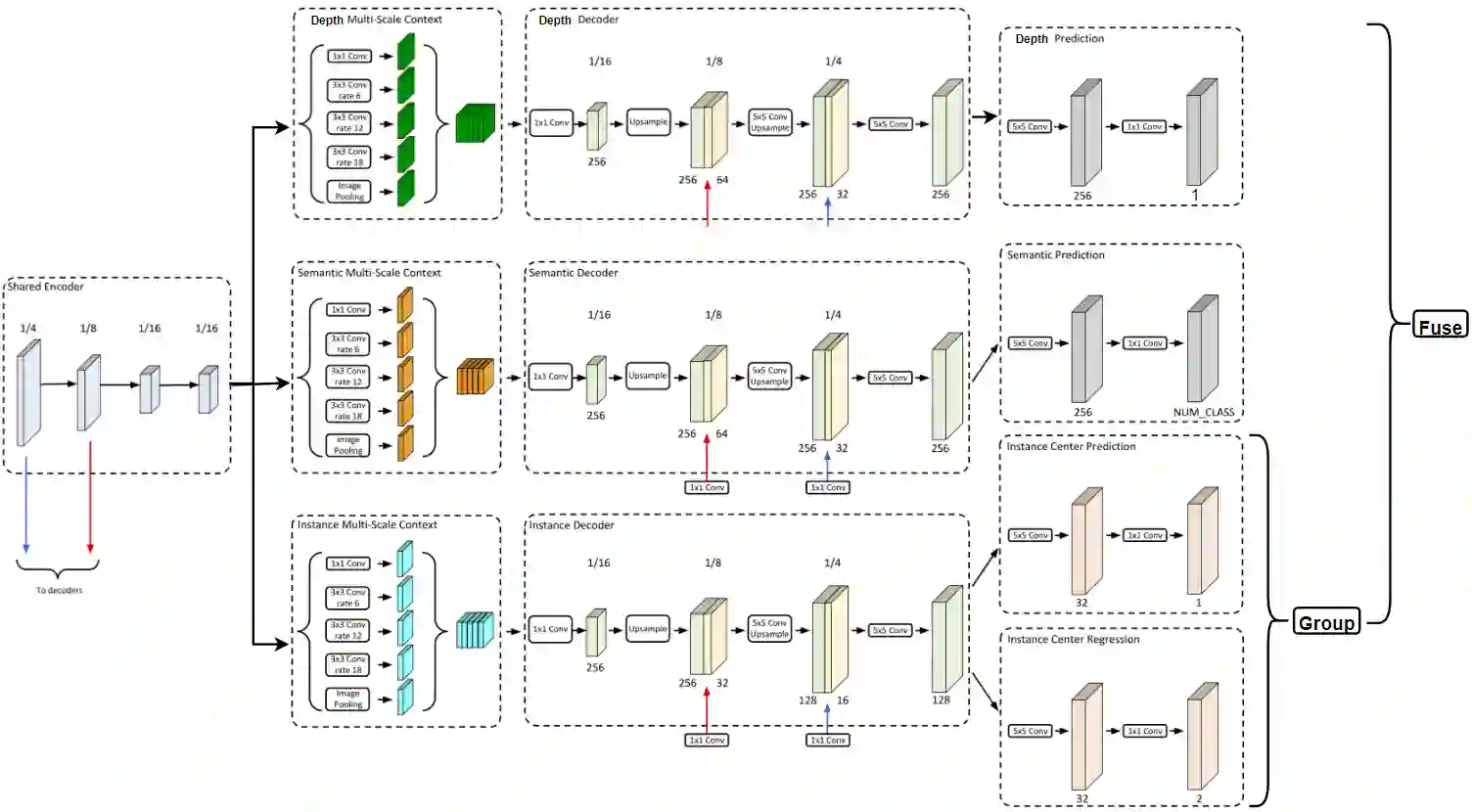
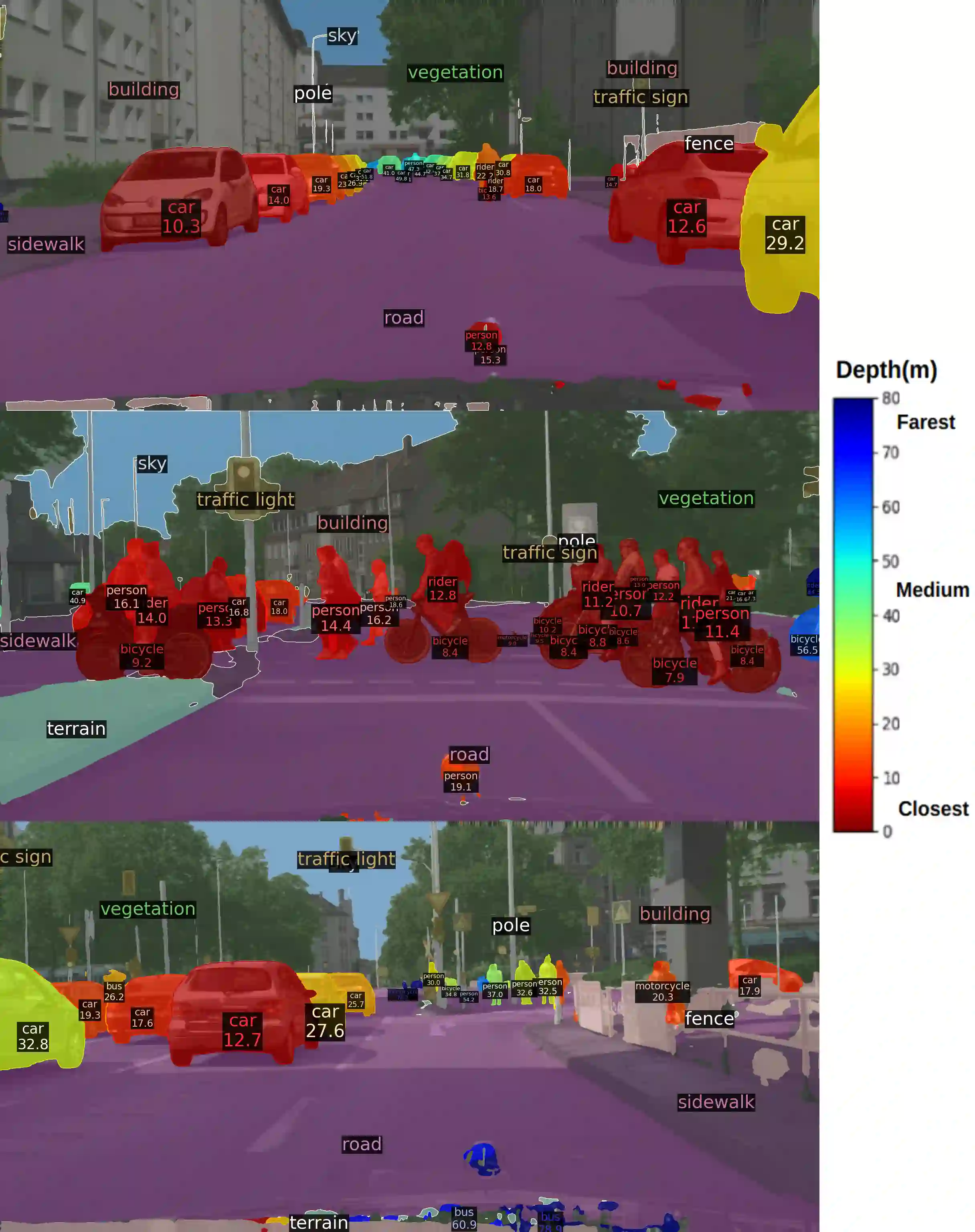
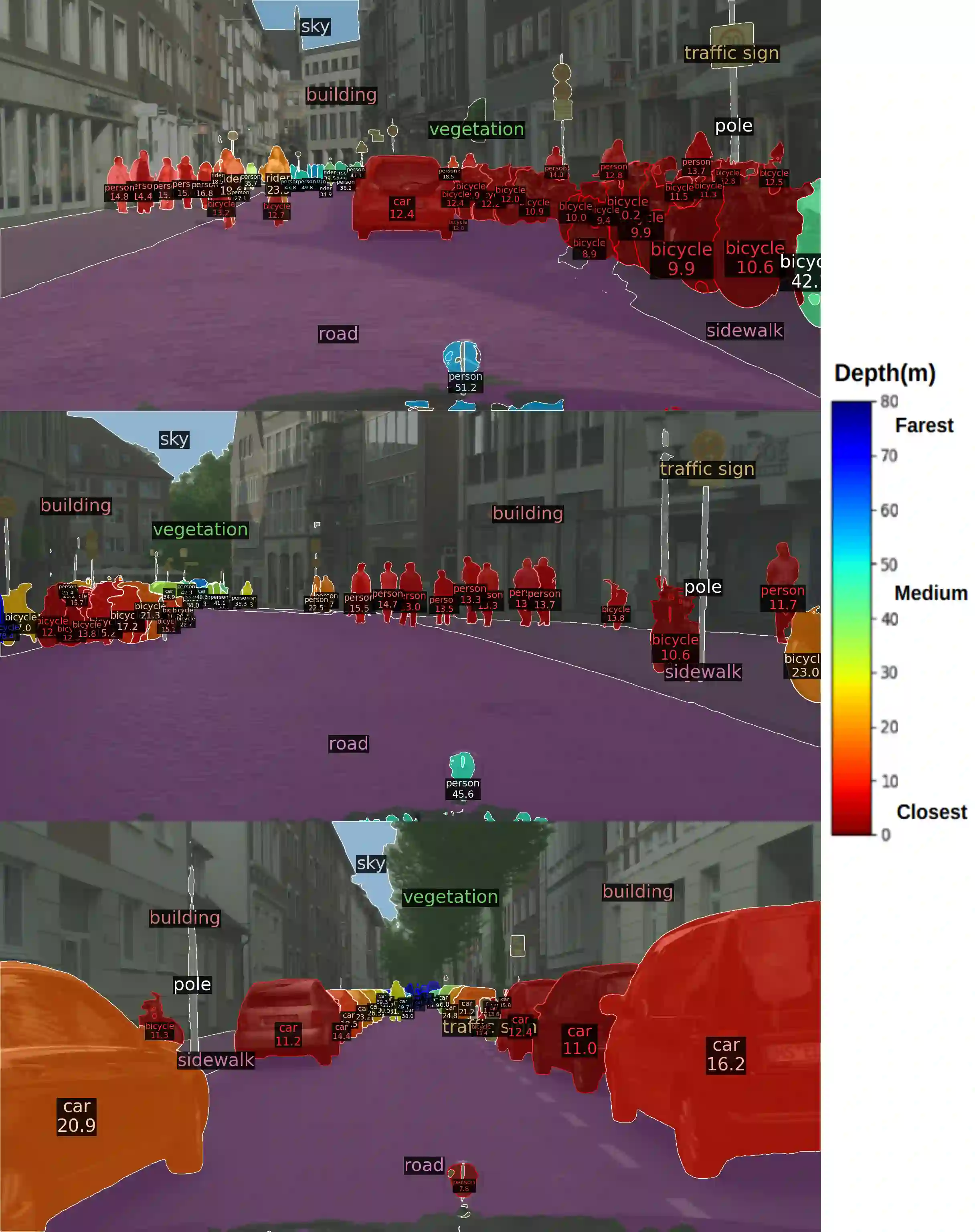
Image segmentation and depth estimation are crucial tasks in computer vision, especially in autonomous driving scenarios. Although these tasks are typically addressed separately, we propose an innovative approach to combine them in our novel deep learning network, Panoptic-DepthLab. By incorporating an additional depth estimation branch into the segmentation network, it can predict the depth of each instance segment. Evaluating on Cityscape dataset, we demonstrate the effectiveness of our method in achieving high-quality segmentation results with depth and visualize it with a color map. Our proposed method demonstrates a new possibility of combining different tasks and networks to generate a more comprehensive image recognition result to facilitate the safety of autonomous driving vehicles.
翻译:图像分割与深度估计是计算机视觉中的关键任务,尤其在自动驾驶场景中尤为重要。尽管这些任务通常被分别处理,但我们提出了一种创新方法,通过新颖的深度学习网络Panoptic-DepthLab将二者结合。通过在分割网络中引入额外的深度估计分支,该网络能够预测每个实例分割的深度。基于Cityscape数据集的评估表明,我们的方法在实现高质量分割结果的同时保留了深度信息,并通过彩色地图进行可视化。该方法展示了结合不同任务与网络以生成更全面的图像识别结果的崭新可能性,从而提升自动驾驶车辆的安全性。