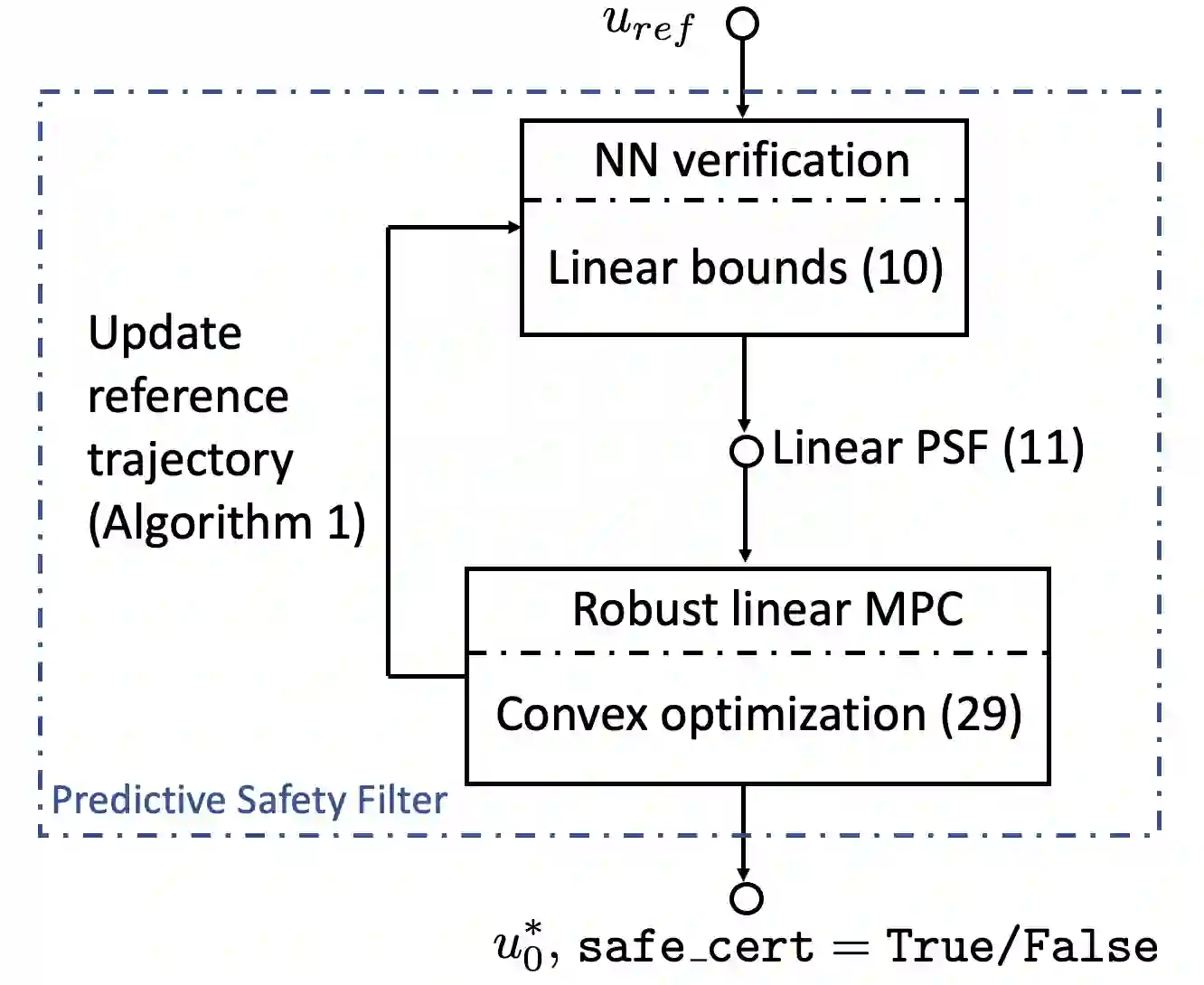
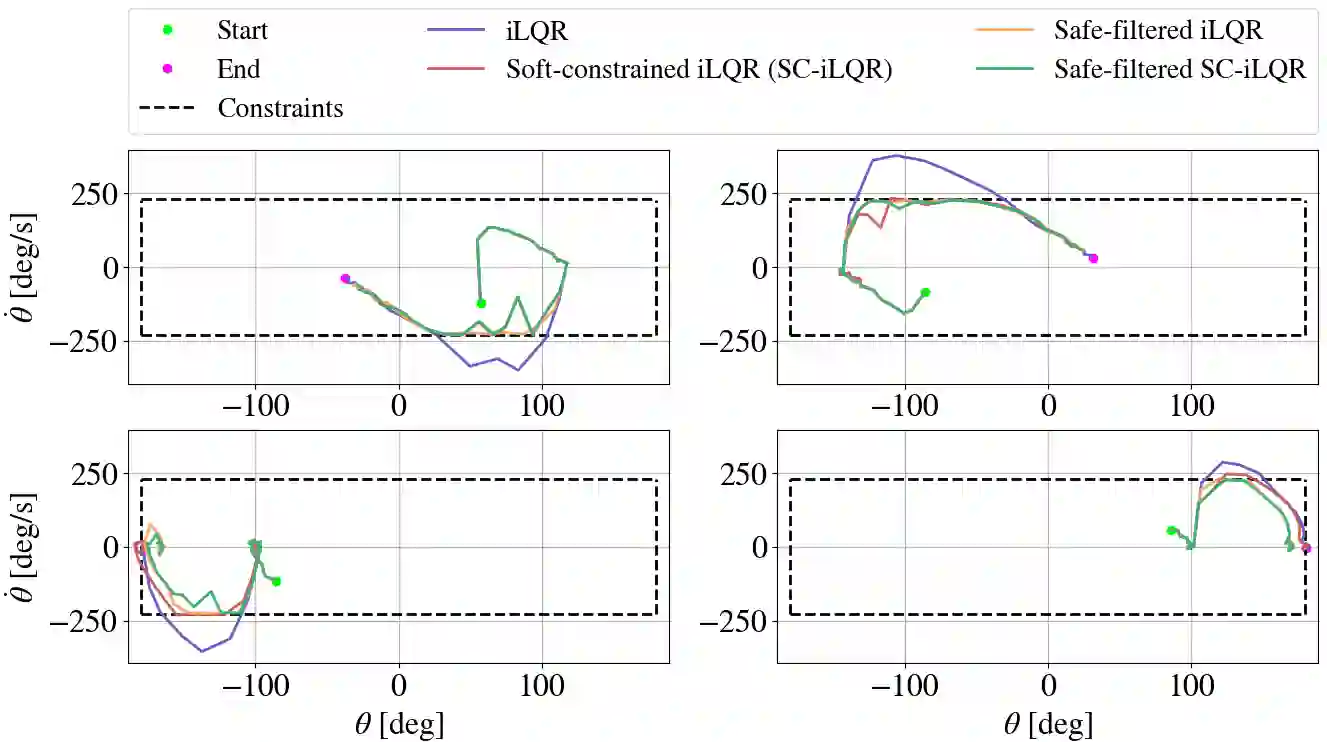
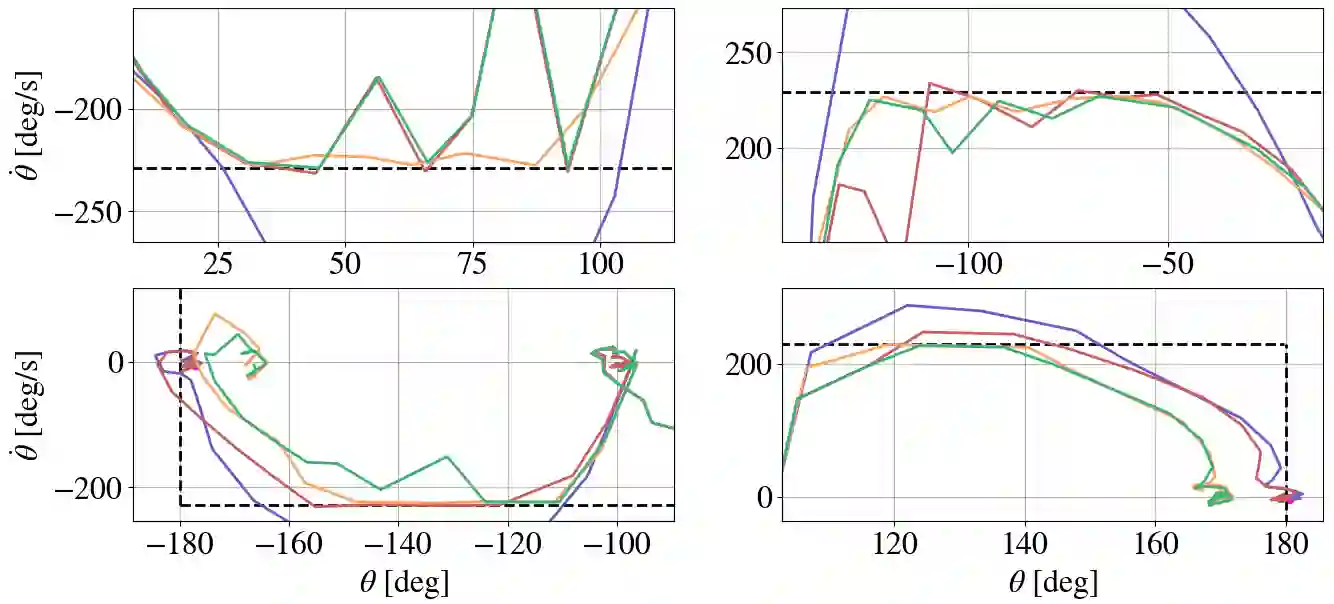
With the increase in data availability, it has been widely demonstrated that neural networks (NN) can capture complex system dynamics precisely in a data-driven manner. However, the architectural complexity and nonlinearity of the NNs make it challenging to synthesize a provably safe controller. In this work, we propose a novel safety filter that relies on convex optimization to ensure safety for a NN system, subject to additive disturbances that are capable of capturing modeling errors. Our approach leverages tools from NN verification to over-approximate NN dynamics with a set of linear bounds, followed by an application of robust linear MPC to search for controllers that can guarantee robust constraint satisfaction. We demonstrate the efficacy of the proposed framework numerically on a nonlinear pendulum system.
翻译:随着数据可用性的增加,大量研究表明神经网络能够以数据驱动的方式精确捕捉复杂系统的动态特性。然而,神经网络的结构复杂性和非线性特性使得综合设计可证明安全的控制器面临挑战。本文提出一种基于凸优化的新型安全滤波器,用于确保受加性扰动影响的神经网络系统的安全性,其中这些扰动能够有效表征建模误差。该方法利用神经网络验证工具,通过一组线性边界对神经网络动态进行过近似,随后应用鲁棒线性模型预测控制搜索能够保证鲁棒约束满足的控制器。我们通过非线性摆系统的数值实验验证了所提框架的有效性。