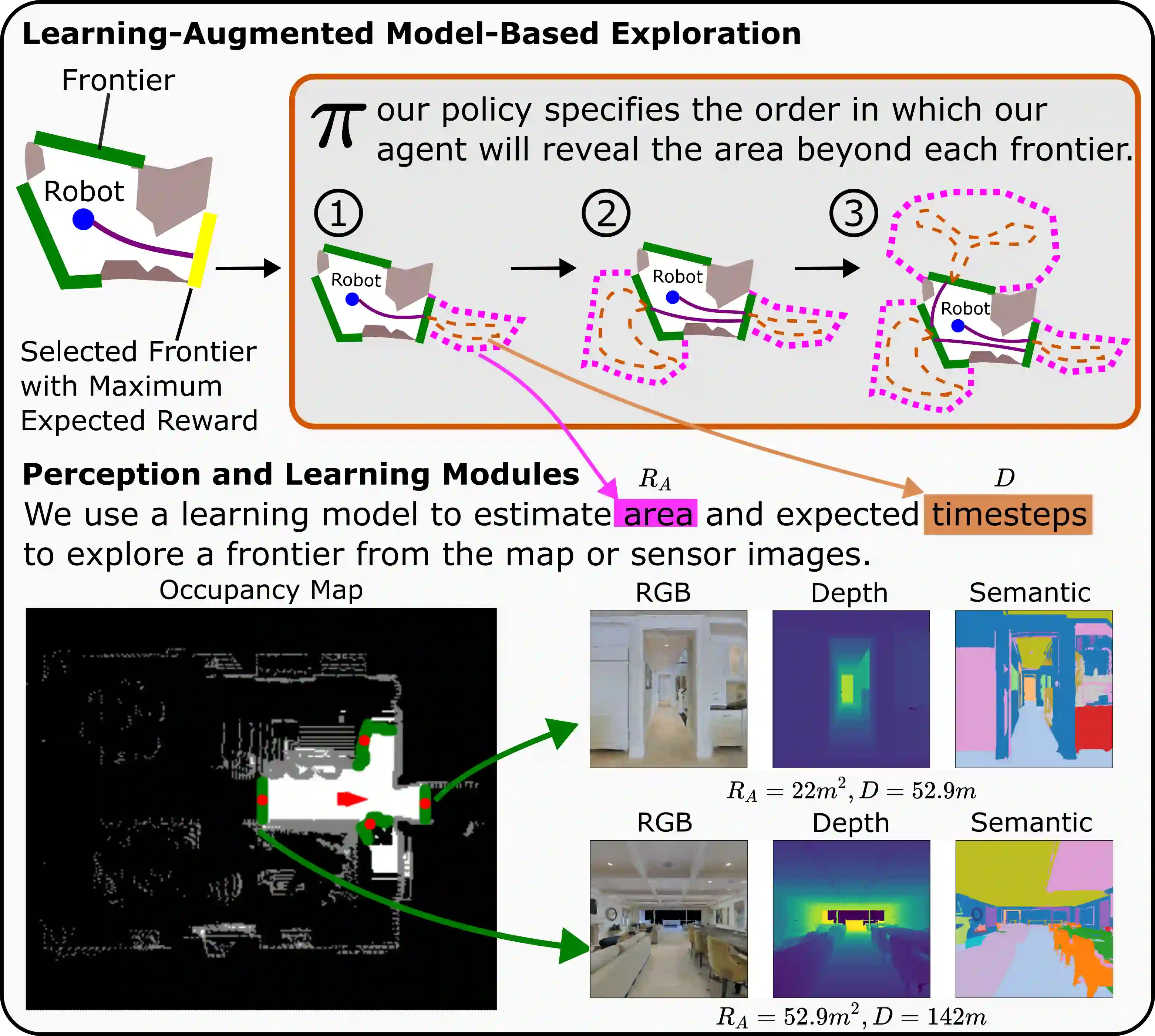
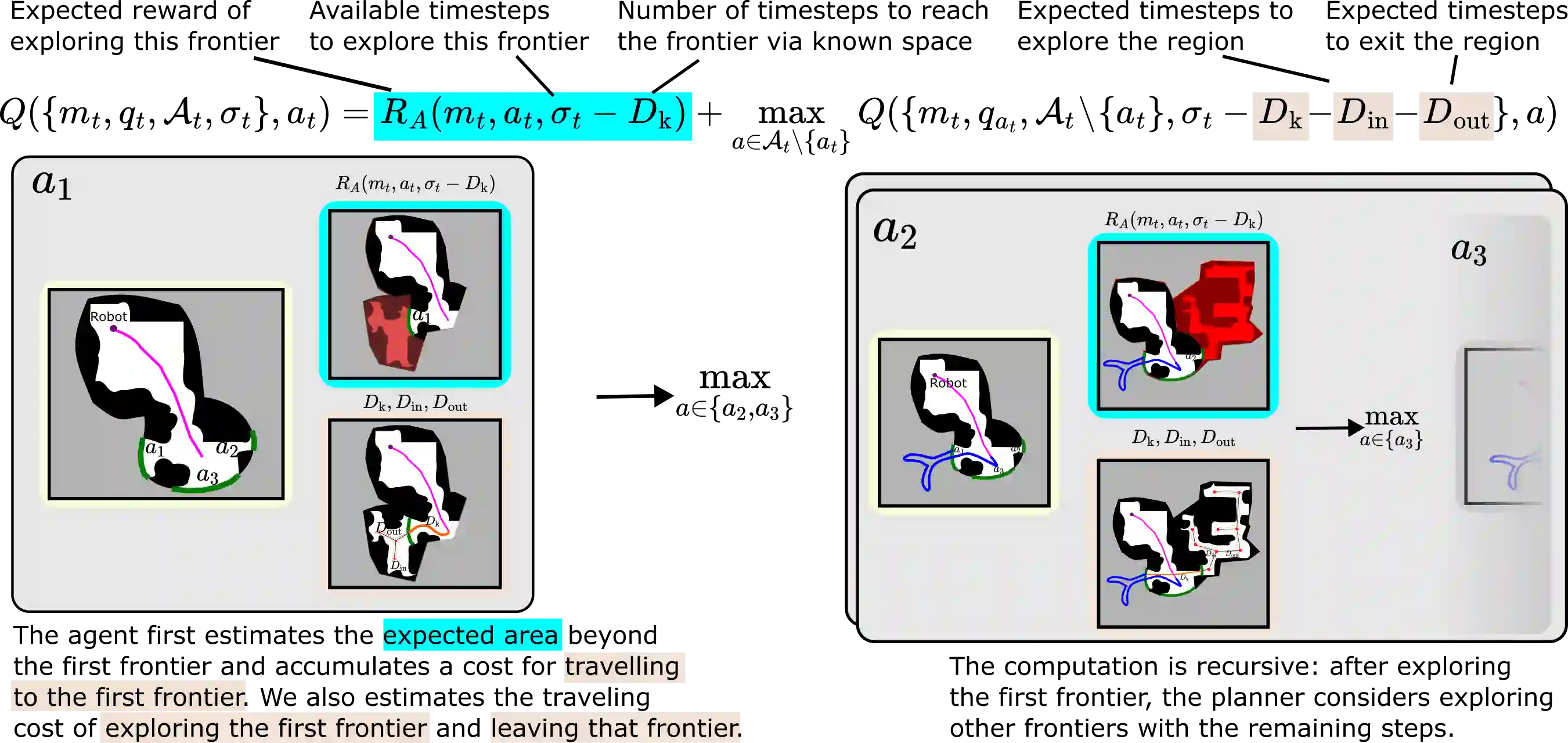
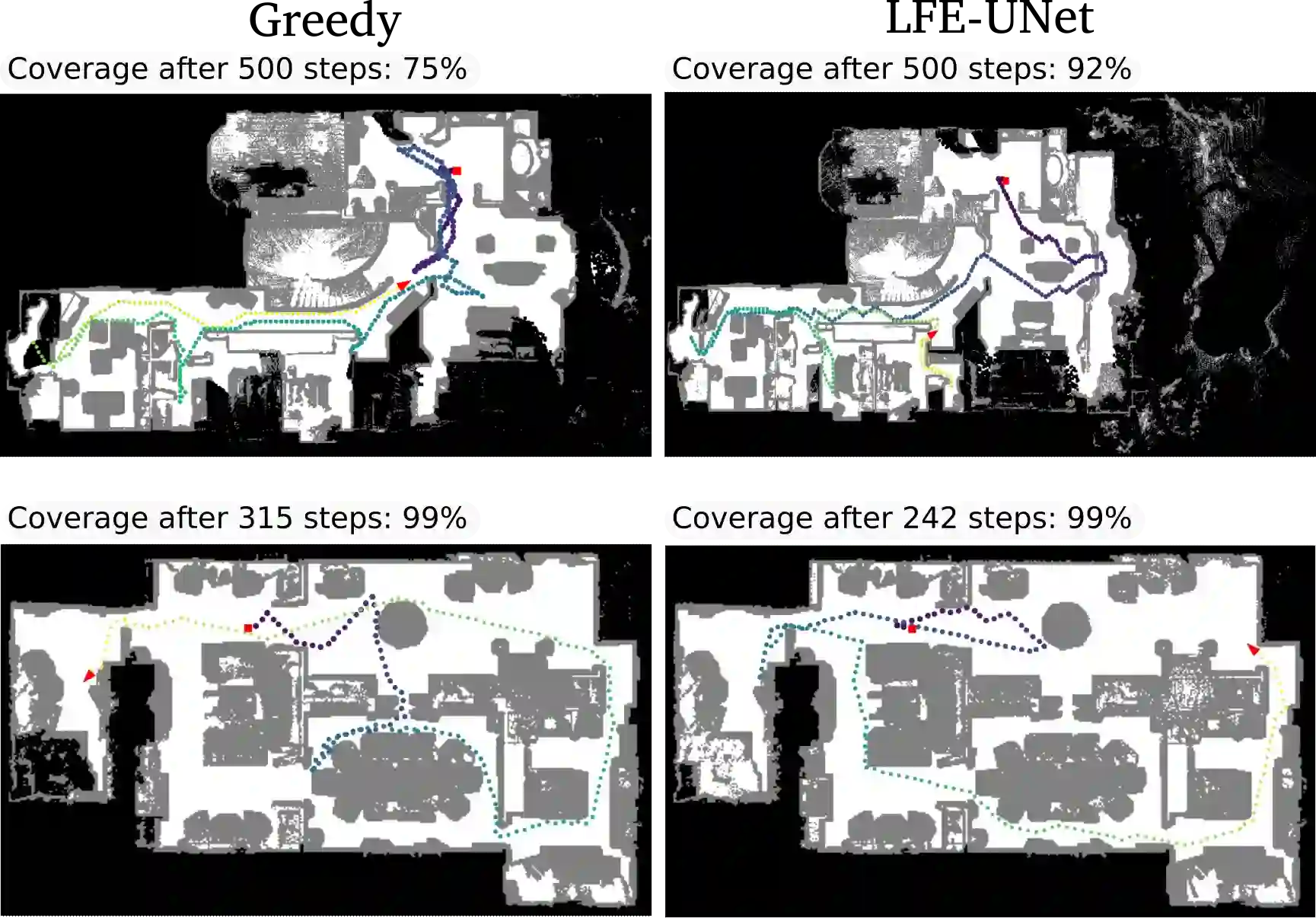
We consider the problem of time-limited robotic exploration in previously unseen environments where exploration is limited by a predefined amount of time. We propose a novel exploration approach using learning-augmented model-based planning. We generate a set of subgoals associated with frontiers on the current map and derive a Bellman Equation for exploration with these subgoals. Visual sensing and advances in semantic mapping of indoor scenes are exploited for training a deep convolutional neural network to estimate properties associated with each frontier: the expected unobserved area beyond the frontier and the expected timesteps (discretized actions) required to explore it. The proposed model-based planner is guaranteed to explore the whole scene if time permits. We thoroughly evaluate our approach on a large-scale pseudo-realistic indoor dataset (Matterport3D) with the Habitat simulator. We compare our approach with classical and more recent RL-based exploration methods. Our approach surpasses the greedy strategies by 2.1% and the RL-based exploration methods by 8.4% in terms of coverage.
翻译:我们考虑在未知环境中进行时间受限的机器人探索问题,其中探索受到预设时间量的限制。我们提出了一种新颖的探索方法,采用学习增强型模型规划。在当前地图上与边界点相关联的一组子目标被生成,并针对这些子目标推导出用于探索的贝尔曼方程。利用视觉感知和室内场景语义映射的最新进展,训练了一个深度卷积神经网络,用于估计每个边界点相关的属性:边界后方预期未观测区域的面积,以及探索该区域所需的预期时间步数(离散化动作)。所提出的基于模型的规划器在时间允许的条件下保证能够探索整个场景。我们在使用Habitat模拟器的大规模伪真实室内数据集(Matterport3D)上全面评估了我们的方法。我们将我们的方法与经典及基于强化学习的较新探索方法进行了比较。就覆盖范围而言,我们的方法比贪婪策略高出2.1%,比基于强化学习的探索方法高出8.4%。