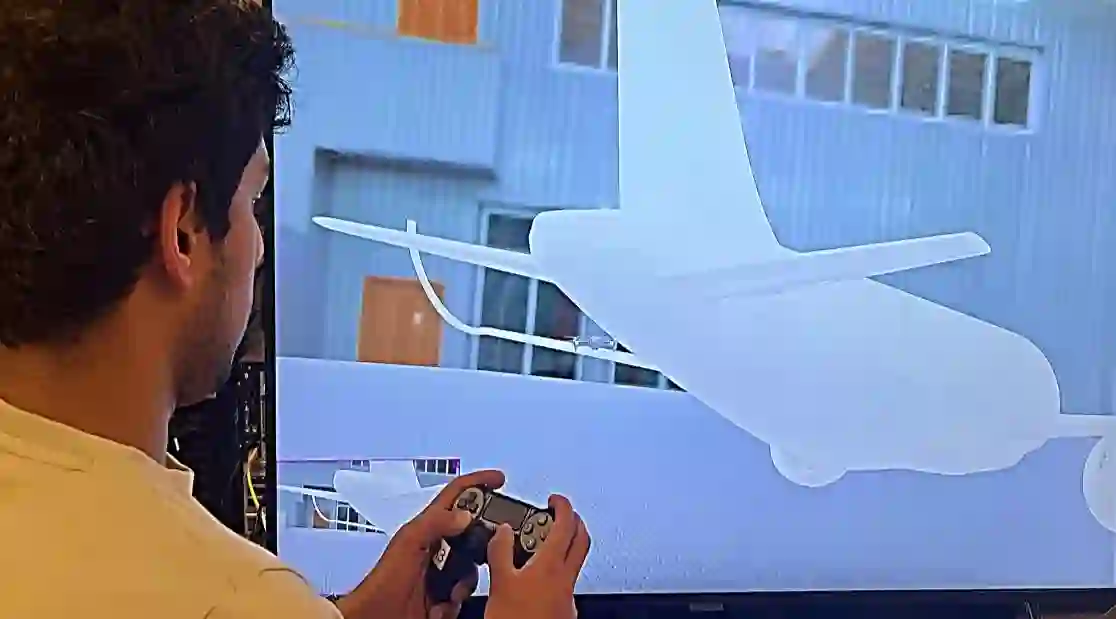
In this paper, a new demonstration-based path-planning framework for the visual inspection of large structures using UAVs is proposed. We introduce UPPLIED: UAV Path PLanning for InspEction through Demonstration, which utilizes a demonstrated trajectory to generate a new trajectory to inspect other structures of the same kind. The demonstrated trajectory can inspect specific regions of the structure and the new trajectory generated by UPPLIED inspects similar regions in the other structure. The proposed method generates inspection points from the demonstrated trajectory and uses standardization to translate those inspection points to inspect the new structure. Finally, the position of these inspection points is optimized to refine their view. Numerous experiments were conducted with various structures and the proposed framework was able to generate inspection trajectories of various kinds for different structures based on the demonstration. The trajectories generated match with the demonstrated trajectory in geometry and at the same time inspect the regions inspected by the demonstration trajectory with minimum deviation. The experimental video of the work can be found at https://youtu.be/YqPx-cLkv04.
翻译:本文提出了一种基于演示的新型航路规划框架,用于使用无人机对大型结构进行视觉检测。我们引入UPPLIED:UAV Path PLanning for InspEction through Demonstration(通过演示进行检测的无人机航路规划),该方法利用演示轨迹生成新轨迹以检测同类其他结构。演示轨迹可检测结构的特定区域,而UPPLIED生成的新轨迹则检测其他结构中的相似区域。所提方法从演示轨迹中生成检测点,并通过标准化将检测点映射到新结构上,最后优化这些检测点的位置以改善其视角。通过在多种结构上进行大量实验,该框架能根据演示生成不同类型结构的多样化检测轨迹。生成的轨迹在几何形态上与演示轨迹相匹配,同时能以最小偏差检测演示轨迹所覆盖的区域。工作实验视频见https://youtu.be/YqPx-cLkv04。